软件环境安装
综述
本教程将会引导读者如何在Linux系统下搭建 KKSWARM 项目所需要的环境。
提示
- 如果您是购买过本产品的用户,可以忽略此内容
- 为了节省开发人员的时间和提高开发人员的效率。阿木实验室提供已经制作好的镜像,该镜像包含下面所有的内容。点击系统镜像下载 下载即可。
- 有能力和精力的用户可以根据下面步骤自行搭建环境
Ubuntu安装
ROS安装
ROS版本选择 Melodic
ROS安装参考: ROS官方教程
补充:官方教程第1.3步 Set up your keys 的命令修改为
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
相机驱动安装
- 进入海康威视官网,选择
机器视觉工业相机客户端MVS V2.1.0(Linux)进行下载
注意
根据实际情况,版本可能有小更新。选择
机器视觉工业相机客户端MVS V2.1.x (Linux)。本项目使用的是 2.1.0版本。(您也可以点击这里下载 2.1.0版本 )
-
下载完成以后,解压。解压后将会显示适应各种架构的计算机的压缩包。这里选择
MVS-2.1.0_x86_64_20201228.tar.gz这个压缩包进行安装。 -
解压第2步选择的压缩包
tar -xvzf MVS-2.1.0_x86_64_20201228.tar.gz cd MVS-2.1.0_x86_64_20201228 sudo bash setup.sh相机驱动将会安装在
/opt/MVS中启动相机界面的命令为
cd /opt/MVS/bin ./MVS.sh界面如图1所示:
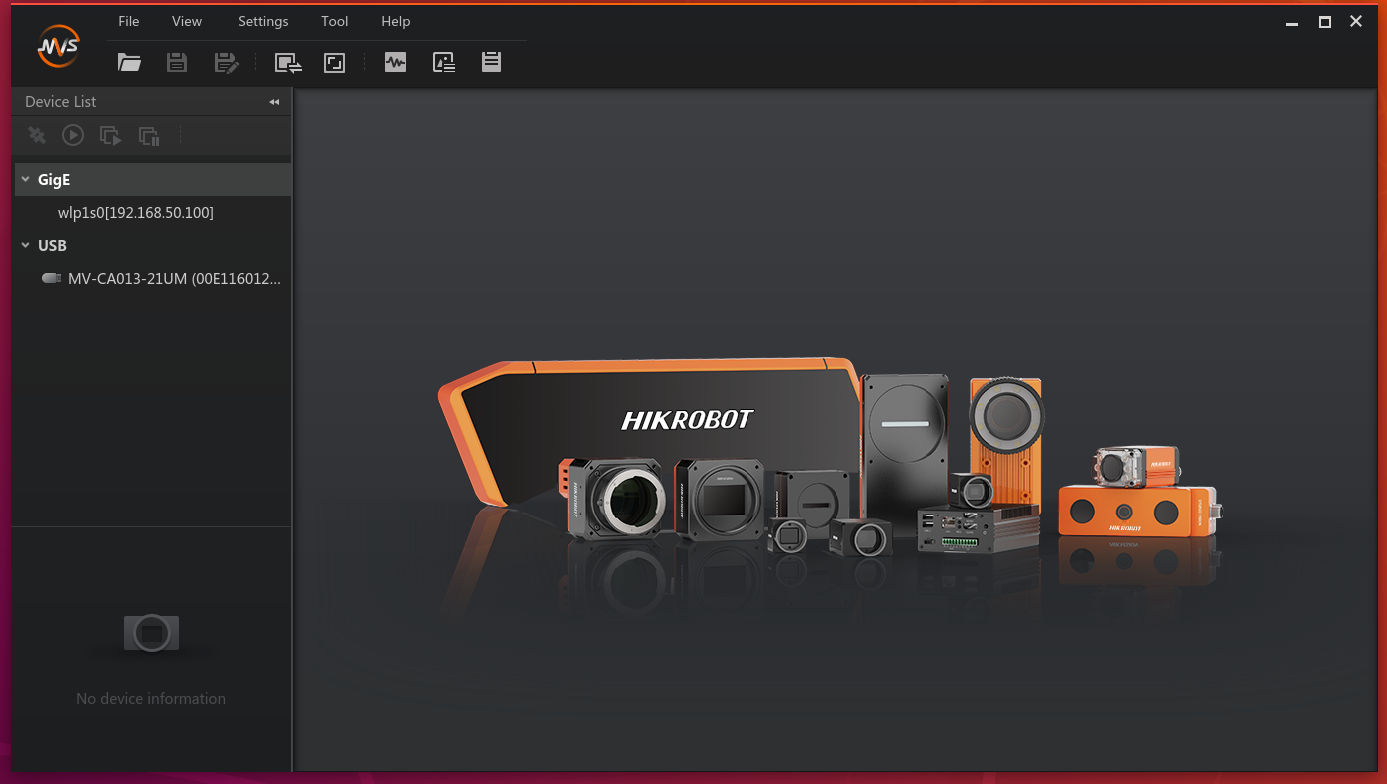
图1 相机启动界面
相机驱动的动态链接库路径为
/opt/MVS/lib/64相机驱动头文件路径为
/opt/MVS/include/ -
安装完毕后,将海康威视的动态库加入到系统动态库中。否则程序将无法运行。
cd /etc/ld.so.conf.d sudo vim hik.conf ## 如果不会vim,则输入 sudo gedit hik.conf #在第一行加入相机驱动的动态链接库路径 /opt/MVS/lib/64 sudo ldconfig # 刷新配置
警告
第4步很重要
KKswarm安装
git clone https://github.com/kkswarm/kk-robot-swarm
Apriltag以及apritag_ros安装
KKSWARM 项目采用的标签家族是 Tag36h11,尺寸是7cm。 详情见 doc/apritags1-50.pdf。您也可以通过软件自动生成该家族标签。详情点击通过openmv生成apriltag标签
Apriltag依赖安装
sudo apt install python3-pip
pip3 install numpy
Apriltag安装
cd ~/kk-robot-swarm/
git clone https://github.com/AprilRobotics/apriltag.git
cd apriltag
mkdir build
cmake ..
make -j4
sudo make install
- Apriltag相关头文件将会被安装在
/usr/local/include/apriltag - Apriltag相关的库将会被安装在
/usr/local/lib/ - 有关Apriltag的相关信息,可以访问其GitHub项目主页获取更多信息
apriltag_ros安装
KKSWARM 项目针对 apriltag_ros 这个功能包做了二次开发和修改
为了提升研发效率,已经将修改后的集成到代码中,当用户克隆 KKSWARM 项目的时候,会将修改后的 apriltag_ros 一并下载。
编译
cd ~/kk-robot-swarm
catkin_make
添加环境变量
echo "source ~/kk-robot-swarm/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
至此,整个 KKSWARM 项目的软件环境安装完毕。