多车pure_pursuit功能演示(C++)演示
本教程将会引导读者完成 多车pure_pursuit功能演示(C++) 的演示。在使用此功能之前,确保已经完成了 Demo前期准备工作
提示
启动此Demo前,请关闭所有终端
- 打开终端,输入命令,启动
roscore:
roscore
- 启动相机驱动。打开终端,输入命令:
rosrun camtoros camtoros
- 启动二维码检测功能包。打开终端,输入命令:
roslaunch apriltag_ros continuous_detection.launch
- 将1,2,3号小车开机,放置位置如图1所示:
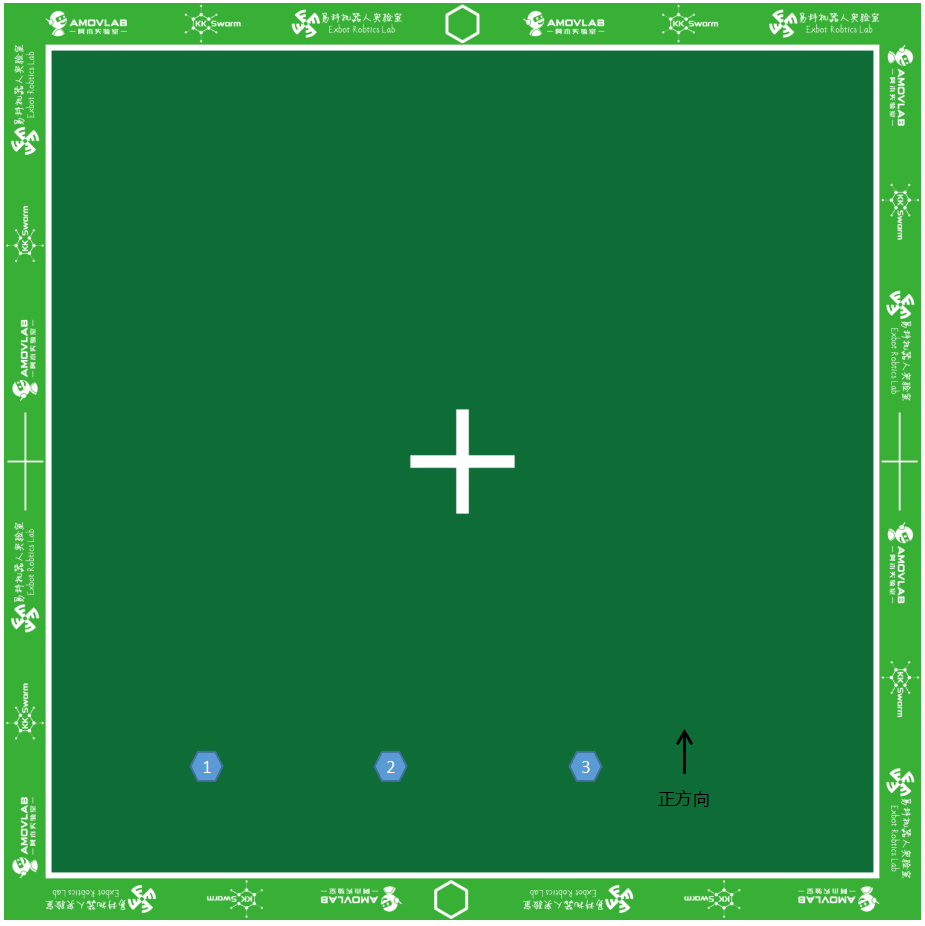
图1 小车位置摆放
注意
- 小车 开关方向 为小车正方向
- 图示位置 左下角 为原点,右边为
x轴正方向,上边为y轴正方向- 摆放的时候小车左右间距尽量大一点, 太近可能会导致刚启动的时候发生碰撞
提示
小车的摆放位置取决于航点的定义,注意不要让航点产生交叉。此Demo集群小车不具备避障功能
- 启动通信节点。打开终端,输入命令:
rosrun tcp_communication tcpDriverNode
- 启动定位系统节点。
打开
kk-robot-swarm/src/global_vision/launch/start.launch文件, 将 car_total_num 与 car_num 改为 3,如下所示:
最后启动定位系统。打开终端,输入命令:<launch> <node pkg="global_vision" type="odometryPub" respawn="false" name="odometryPub" output="screen"> <param name="car_total_num" value="3" /> </node> <node pkg="global_vision" type="static_tf" respawn="false" name="static_tf" output="screen"> <param name="car_num" value="3" /> </node> <!-- tf publisher --> <!-- matrix (1, 0, 0, 0, -1, 0, 0, 0, -1) --> <node pkg="tf" type="static_transform_publisher" name="map_hik_broadcaster" args="0 2 4 1 0 0 0 map hik_camera 100" /> </launch>
roslaunch global_vision start.launch
- 打开 rviz。打开终端,输入命令:
roscd camtoros/config
rviz -d tf.rviz
-
在rviz中加载航点。 首先打开
kk-robot-swarm/src/swarm/waypoint_loader/launch/waypoint_loader.launch文件。如下所示:<?xml version="1.0"?> <launch> <node pkg="waypoint_loader" type="waypoint_loader.py" name="waypoint_loader_1" output="screen"> <param name="path" value="$(find waypoint_loader)/waypoints/robot_1.csv" /> <param name="velocity" value="0.2" /> <remap from="/path" to="/robot_1/path" /> </node> <node pkg="waypoint_loader" type="waypoint_loader.py" name="waypoint_loader_2" output="screen"> <param name="path" value="$(find waypoint_loader)/waypoints/robot_2.csv" /> <param name="velocity" value="0.2" /> <remap from="/path" to="/robot_2/path" /> </node> <node pkg="waypoint_loader" type="waypoint_loader.py" name="waypoint_loader_3" output="screen"> <param name="path" value="$(find waypoint_loader)/waypoints/robot_3.csv" /> <param name="velocity" value="0.2" /> <remap from="/path" to="/robot_3/path" /> </node> </launch>然后打开
kk-robot-swarm/src/swarm/waypoint_loader/waypoints/文件夹。在该文件夹下可以看到预定义的航点信息。最后打开终端,输入命令:
roslaunch waypoint_loader waypoint_loader.launch
-
修改航路点文件(以
robot_1.csv为例)打开
kk-robot-swarm/src/swarm/waypoint_loader/waypoints/robot_1.csv文件内容如下:0.2,0.2,0.1 0.4,0.6,0.1 0.2,1.2,0.1每一行代表一个航点的
(x,y)坐标,第三列代表航向。(暂时用不到) -
启动pure_pursuit功能包。 打开
kk-robot-swarm/src/swarm/pursuit/launch/pure_pursuit.launch文件,如下所示:<launch> <arg name="name_1" default="robot_1"/> <arg name="name_2" default="robot_2"/> <arg name="name_3" default="robot_3"/> <!-- Pure pursuit path tracking --> <node pkg="pure_pursuit" type="pure_pursuit" name="controller_1" output="screen"> <rosparam file="$(find pure_pursuit)/config/$(arg name_1).yaml" command="load"/> <remap from="path_segment" to="$(arg name_1)/path"/> <remap from="odometry" to="$(arg name_1)/pose"/> <remap from="cmd_vel" to="$(arg name_1)/cmd_vel"/> </node> <!-- add more params and nodes--> <node pkg="pure_pursuit" type="pure_pursuit" name="controller_2" output="screen"> <rosparam file="$(find pure_pursuit)/config/$(arg name_2).yaml" command="load"/> <remap from="path_segment" to="$(arg name_2)/path"/> <remap from="odometry" to="$(arg name_2)/pose"/> <remap from="cmd_vel" to="$(arg name_2)/cmd_vel"/> </node> <node pkg="pure_pursuit" type="pure_pursuit" name="controller_3" output="screen"> <rosparam file="$(find pure_pursuit)/config/$(arg name_3).yaml" command="load"/> <remap from="path_segment" to="$(arg name_3)/path"/> <remap from="odometry" to="$(arg name_3)/pose"/> <remap from="cmd_vel" to="$(arg name_3)/cmd_vel"/> </node> </launch>打开终端,输入命令:
roslaunch pure_pursuit pure_pursuit.launch
警告
此Demo不带有避障功能,如果路径发生交叉,小车将会发生碰撞
- 停车。首先 关闭第10步 的程序,然后打开终端,输入:
rosrun global_vision stop
视频演示
提示
如果无法播放视频,按下
ctrl+F5刷新一下缓存即可