Matlab仿真环境搭建
本教程将会引导读者搭建 KKSWARM 项目所需要的Matlab仿真环境。在搭建环境之前,确保已经安装了 Matlab2021b 版本及以上。
警告
目前尚未在低于Matlab2021b上进行测试,低于该版本可能导致程序无法运行。
Windows10环境
安装python2.7环境
- 点击下载 python2.7 for Windows
- 下载完成以后,双击进行安装。选择
Install for all users,然后点击Next如图1所示:
图1 python2.7安装界面
- 接着选择安装路径,可以 自定义路径,也可以选择 默认。这里是 默认路径。如图2所示:
图2 路径选择界面
- 接着点击
Next,保持默认即可。如图3所示:
图3 自定义界面
-
接下来就会开始安装,等待安装完成即可。
-
安装完成以后,开始设置环境变量。依次打开 设置 -- 系统 -- 关于 -- 高级系统设置 -- 环境变量。
提示
如果是win11系统,依次打开 设置 -- 系统 -- 系统信息 -- 高级系统设置 -- 环境变量
然后双击 系统变量 下的
Path。如图4所示:
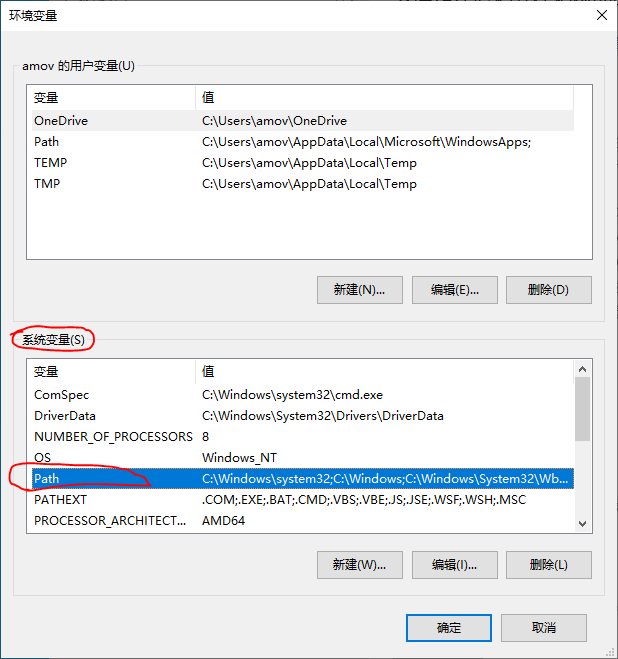
图4 环境变量设置界面
- 双击打开
Path后,点击 新建,然后将 第3步 安装的时候的路径复制下来即可。如图5所示:
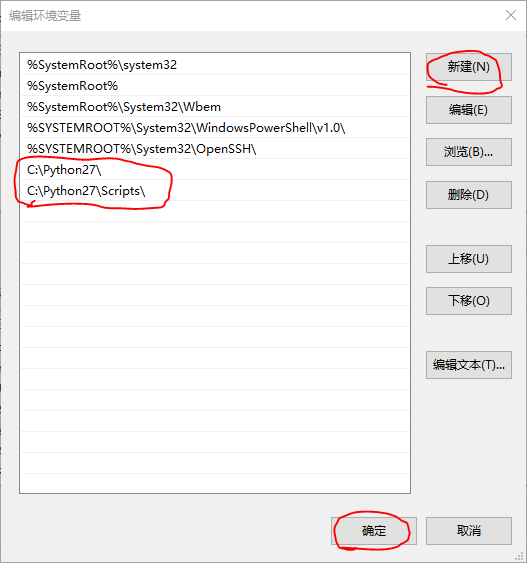
图5 添加环境变量
- 接着按下键盘上的
win+r,在弹出的界面中输入cmd,打开windows shell。如图6所示:
图6 按下 win + r 后的界面
- 在windows shell中输入命令
python并回车,将会返回 python 的解释器界面,表示环境变量设置成功。如图7所示:
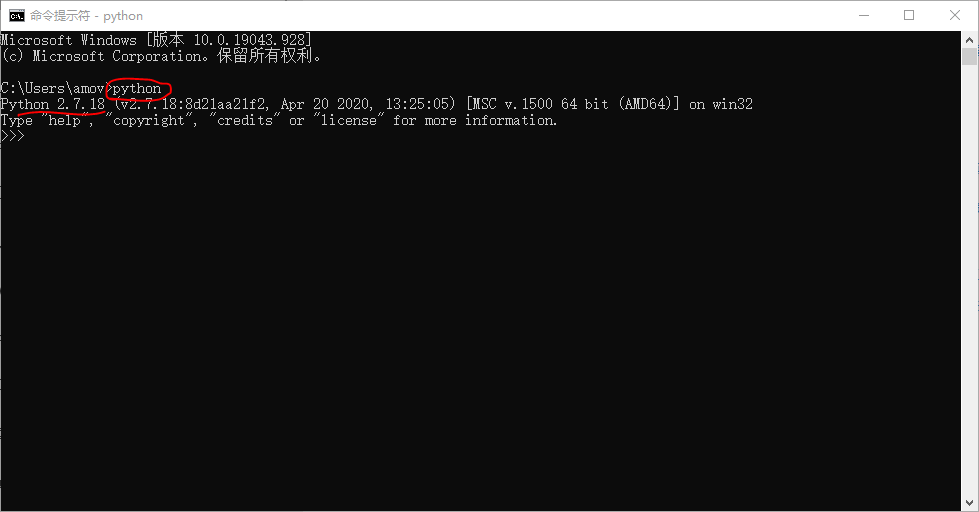
图7 python环境设置成功界面
安装MinGW
打开Matlab,点击 附件功能 -- 获取附件功能,在搜索栏输入MATLAB Support for MinGW-w64 C/C++ Compiler,在工具箱主界面右侧有一个安装按钮,点击安装,按照默认步骤安装即可
安装Cmake
- 点击下载 cmake3.24 for windows
- 下载完成以后,双击进行安装。需要注意的是,选中
Add Cmake to system PATH for all users如下图所示:
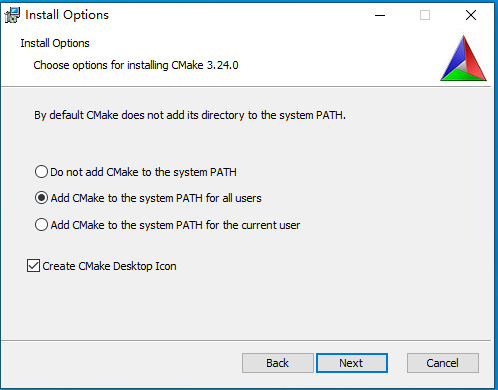
图19 设置cmake环境变量
- 然后选择安装路径,这里选择默认路径,如图20所示:
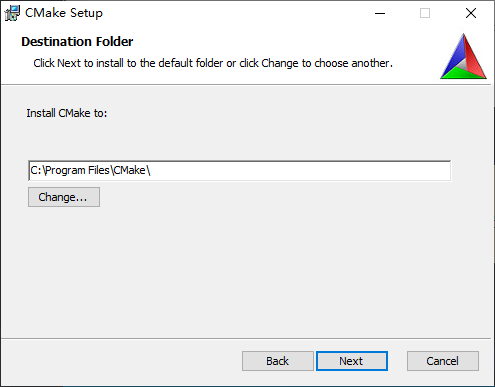
图20 cmake安装路径
- 等待安装完成
- 接着按下键盘上的
win+r,在弹出的界面中输入cmd,打开windows shell。如图21所示:
图21 按下 win + r 后的界面
- 然后输入命令
cmake --version,查看是否安装成功。如图22所示:
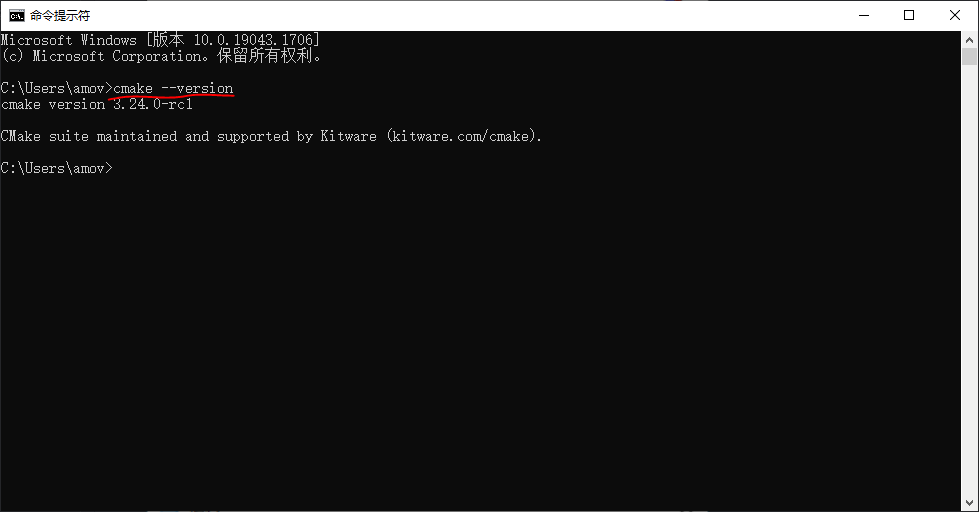
图22 安装成功界面
Matlab附加工具安装
KKSWARM 项目的开发需要安装以下 Matlab附加工具
- 依次打开 matlbaR2021b 菜单栏上的 附加功能 -- 获取附加功能,在弹出的界面中输入
MATLAB Coder Interface for Deep Learning Libraries,并且安装。 - 依次打开 matlbaR2021b 菜单栏上的 附加功能 -- 获取附加功能,在弹出的界面中输入
Mobile Robotics Simulation Toolbox,并且安装。
仿真Demo相关代码下载
git clone https://github.com/kkswarm/kk-robot-swarm
下载好以后,将 kk-robot-swarm/src/ 下的 matlab 文件夹拷贝出来即可
这里对matlab下的文件进行说明:
matlab代码说明
matlab文件下有 axxx.slx、bxxxx.slx、cxxxx.slx三种类型的仿真文件。其中:
a开头的文件表示matlan纯仿真模块,例如:a1_waypoint.slxb开头的文件表示matlab+ros仿真模块,该类文件中引入了ROS仿真c开头的文件表示真车使用的代码,该类文件用于生成ROS代码并部署到真实物理环境中
Linux环境
TODO