PX4-Gazebo仿真说明
在介绍PX4-Gazebo仿真之前,我们先介绍一下基于PX4的旋翼无人机系统

首先,先了解一下上面这幅PX4无人机框架图,可以看到PX4旋翼无人机包含机架、电机、旋翼、飞控(飞行控制板)、脚架等必需模块,这是无人机实现飞行移动的基础。
其次还包含图传、数传、GPS、激光雷达、视觉传感器等模块,这一块非必需模块和无人机应用场景相关,根据不同的场景会搭载其余模块。
其中,我们需要清楚地认识到真实无人机能够实现飞行功能就必须要有上面所说的必需模块以及配套的软件系统。
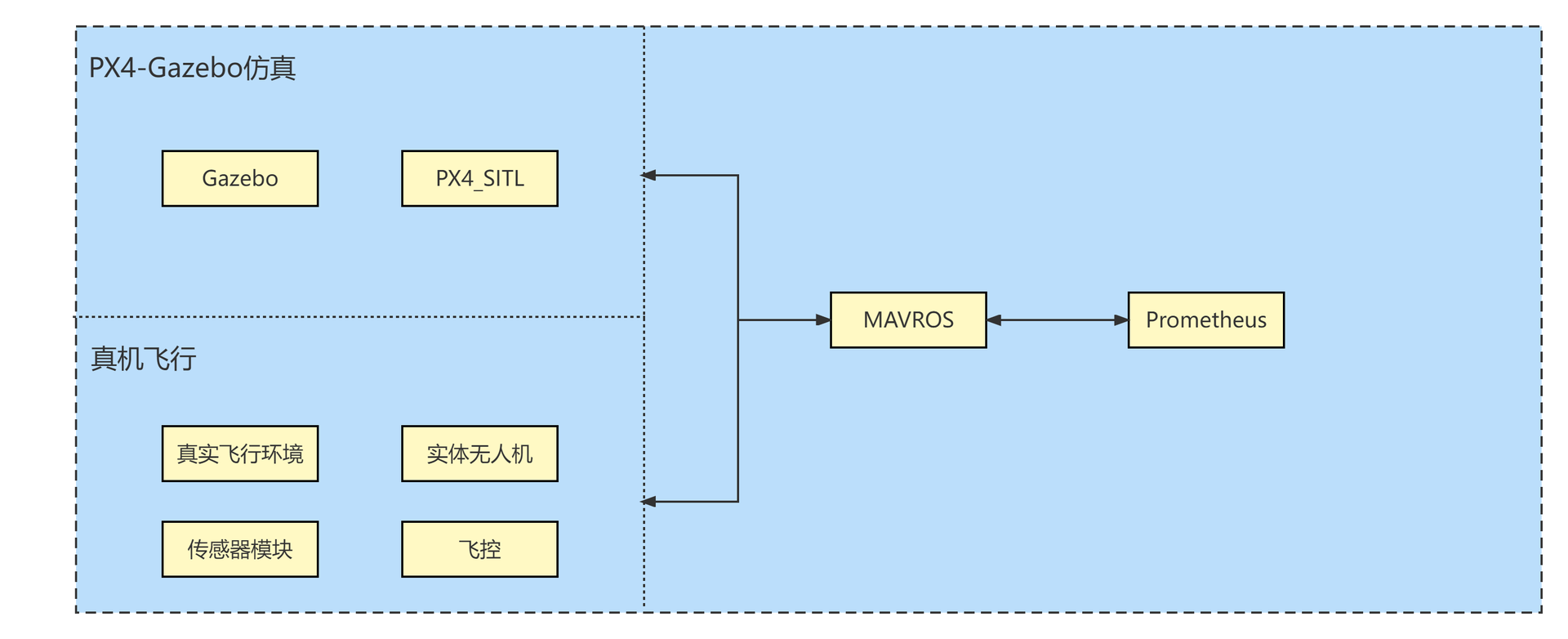
而在仿真当中,我们并不需要这些硬件模块,但是我们需要通过软件来模拟这些硬件模块的数据交互。
其中Gazebo为我们提供了一个物理环境的模拟系统,例如无人机以及飞行环境的可视化、物理属性、碰撞属性等。
而PX4完成了对无人机物理模型以及运动控制模型的搭建、运动控制插件、飞行控制系统等内容。
基于PX4-Gazebo的仿真系统能够完全实现无人机飞行控制的全部功能,除了性能,其余方面与真机表现并无差异.可以简单理解为Gazebo提供无人机硬件仿真,而PX4提供飞控仿真,当然无人机硬件仿真也是由PX4项目组完成,Gazebo仅仅是提供一个物理仿真平台。
关于PX4-Gazebo仿真更多的内容可参考PX4-Gazebo官网介绍