快速上手
本章将讲解如何快速搭建Prometheus仿真环境
提示
Prometheus仿真环境搭建出现相关问题或异常可以前往Prometheus配置常见问题处理 查询相关解决办法,如果没有,可前往阿木社区-Prometheus问答专区或Prometheus微信交流群提问
本教程提供Ubuntu系统下载搭建Prometheus仿真环境以及使用Prometheus仿真镜像系统两种安装方式,任选其中一种方式安装即可。
Ubuntu系统下载搭建Prometheus仿真环境教程除使用手册有介绍外,还搭配有视频教程(如下),用户可参考文档结合视频学习。 Matlab-Gazebo联合仿真展示
提示
虽然使用虚拟机和Prometheus仿真镜像系统能够快速搭建环境,但我们仍然建议大家能够从0到1搭建整个Prometheus环境,这对于后面的开发是非常有意义的。也能够让大家能够对整个Prometheus系统能有更深入地理解。
旧版本Prometheus删除
-
如果已经安装过旧版本的Prometheus项目(指在2022年7月20日之前已完成Prometheus项目的安装),建议先删除Prometheus以及prometheus_px4,然后按照本教程进行安装。
-
.bashrc中prometheus以及prometheus_px4相关环境变量需删除,重新按照本教程添加相关环境变量。
运行第一次仿真
仿真运行依赖于遥控器,需要通过USB数据线将遥控器与仿真电脑进行连接。
如需购买遥控器请点击遥控器购买链接
如果使用其他遥控器,只要数据流能符合目前的程序设计也是可以的。可以查看仿真中的遥控器使用说明中遥控器通道以及含义进行对比。

输入以下命令启动仿真功能测试脚本文件。
# 请将示例中的{your prometheus path}替换为prometheus的安装路径
cd ${your prometheus path}/Prometheus/Scripts/simulation/px4_gazebo_sitl_test
# 第一次使用时需要给脚本文件添加可执行权限
chmod +x px4_sitl_*
# 启动室外无人机仿真启动脚本
./px4_sitl_outdoor.sh
输入该命令后,会出现一个含有三个标签页的终端以及Gazebo,如下图所示。
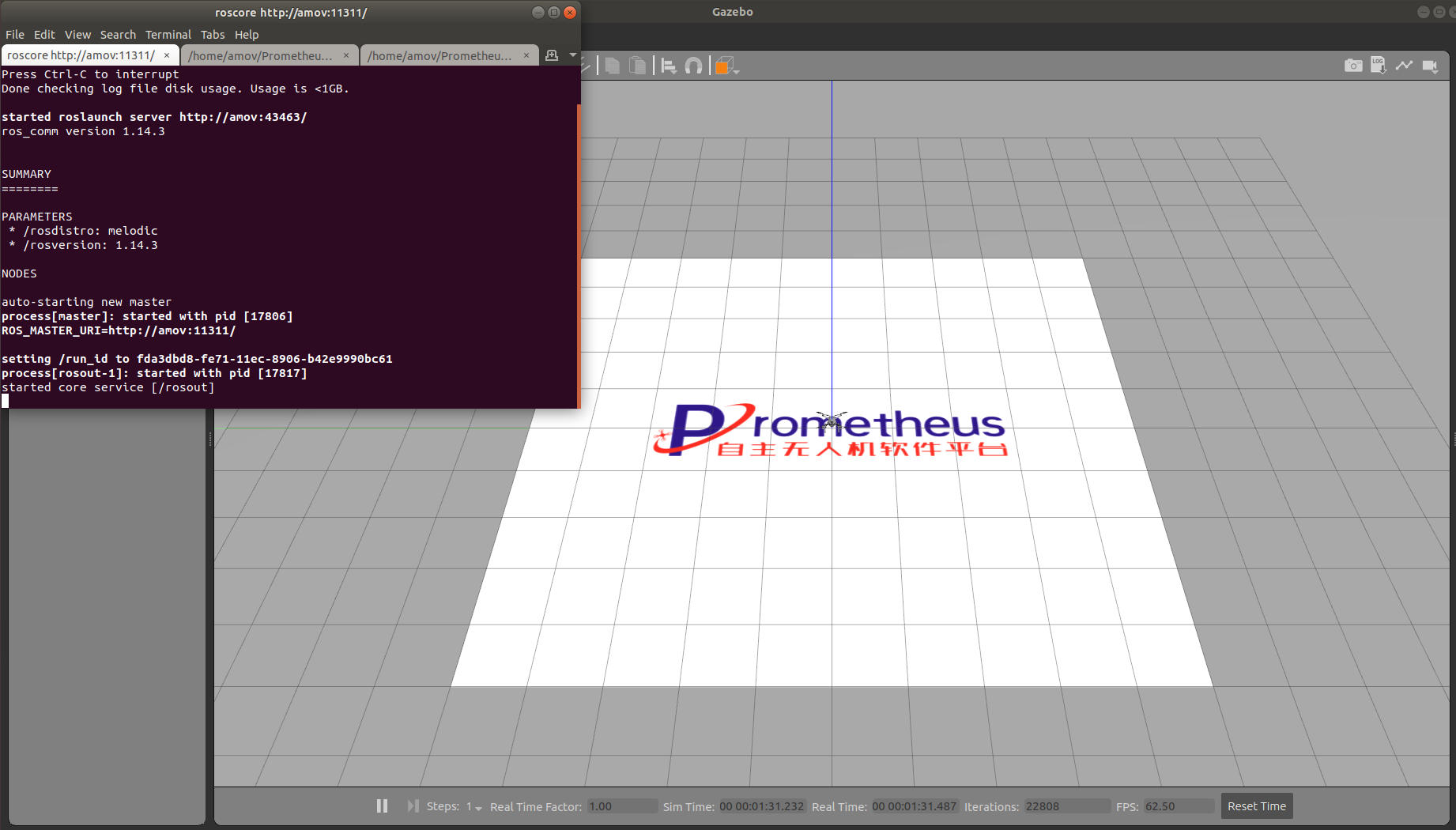
第一个标签页内启动ROS主节点,出现图中内容则说明启动正常。
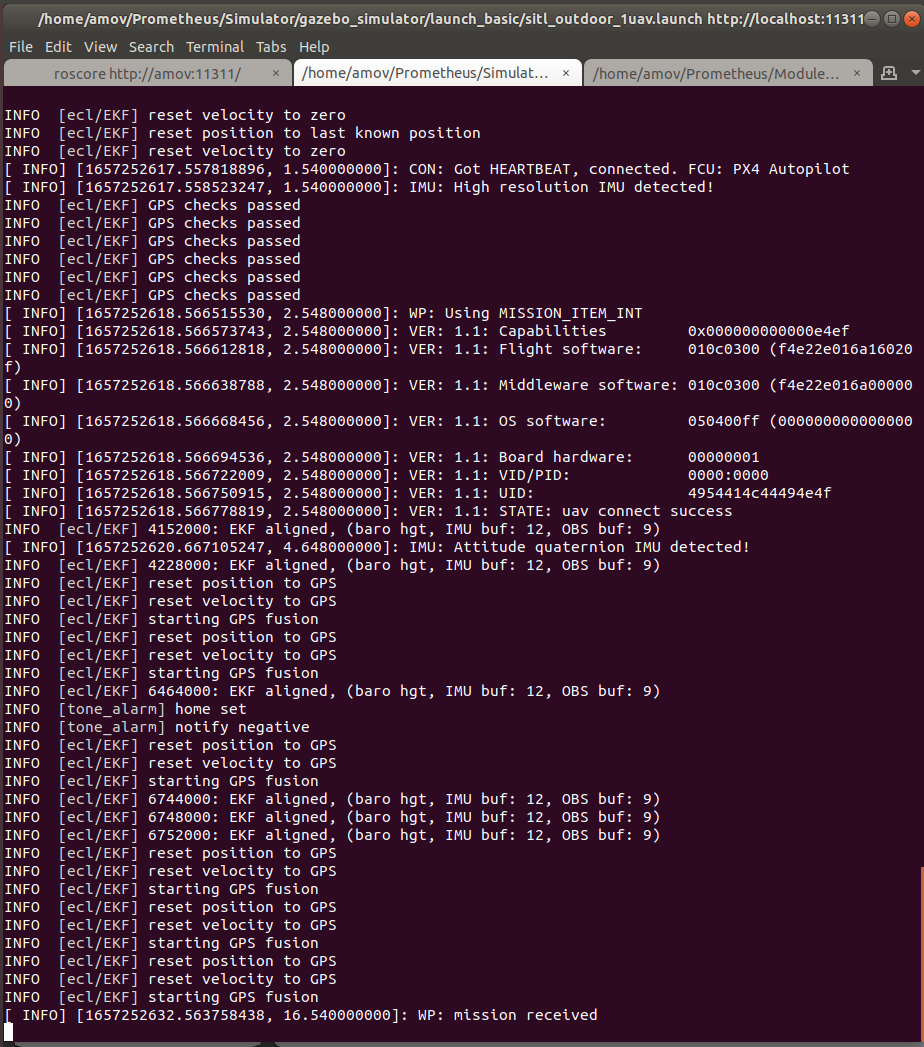
点击终端内的第二个标签页,该标签页为启动PX4以及仿真组件。查看打印信息,出现关键字CON: Got HEARTBEAT, connected. FCU:PX4 Autopilot则证明PX4正常启动,出现Gazebo和无人机则说明仿真组件启动正常。
点击终端内第三个标签页,该标签页为启动Prometheus uav_control_main节点。该界面会打印无人机相关信息,包含无人机状态信息和控制数据。
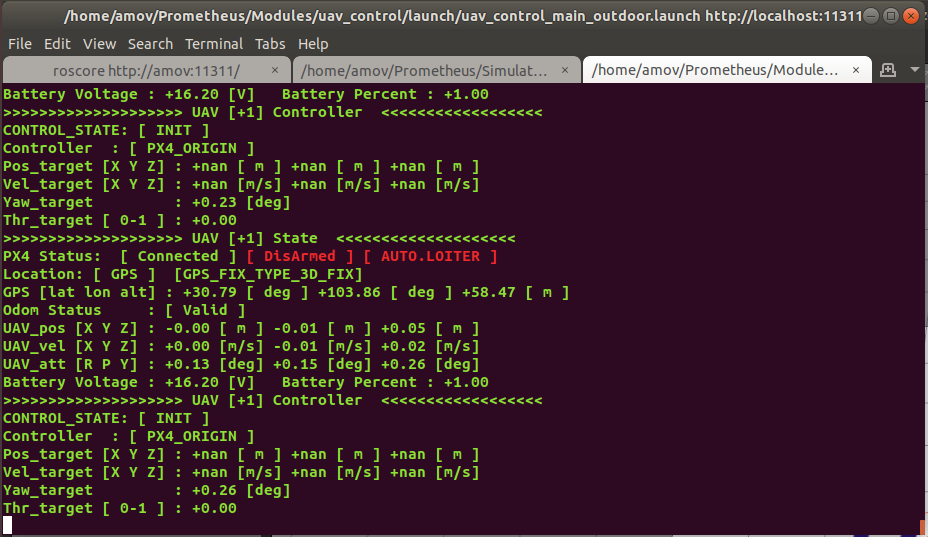
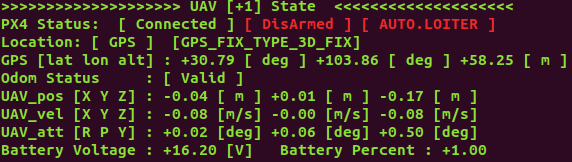
其中无人机状态信息如下图所示。
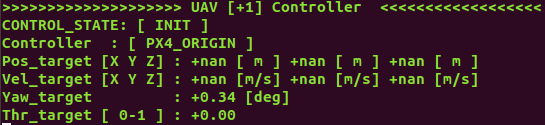
控制数据如下图所示。
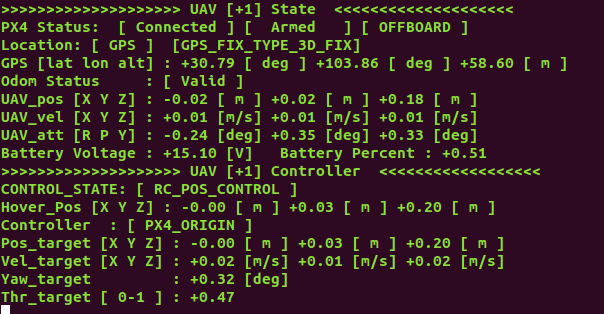
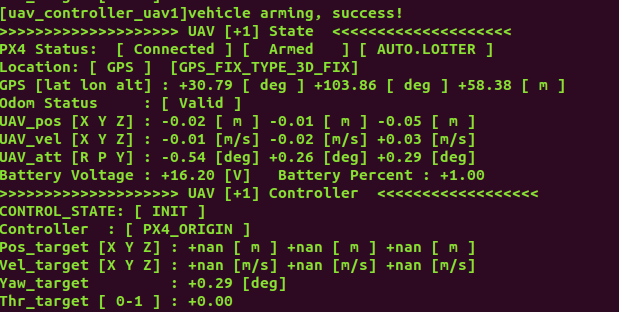
然后将遥控器SWA档杆打至最底端,此时无人机将解锁进入怠速状态,无人机状态信息如下图所示。
再将遥控器SWB档杆打至中间位置,此时无人机及进入RC_POS_CONTROL控制模式,此时可以通过遥控器控制无人机飞行,无人机状态信息如下图所示。