准备工作
环境要求
推荐环境
x86架构电脑:windows10、windows11、ubuntu 20.04系统
windows版本注意:目前windows版本仅在windows10和windows11上进行测试,其他windows版本可以自行测试使用。 ubuntu版本注意:最新版本地面站仅支持 ubuntu 20.04系统,理论上可以向后兼容,所以在 ubuntu 22.04系统应该可以运行(需自行测试)。
软件下载
注意
早期地面站因为协议上的一些变动,可能存在协议不匹配情况,从而导致地面站使用过程中出现协议不匹配的情况,可以查看更新记录查看更多对应情况。
根据自己需求下载windows版本或者ubuntu版本,然后查看下方对应的配置使用教程。
Ubuntu版本
地面站下载运行
下载完成后需要赋予权限,操作如下:
chmod a+x PrometheusGroundStation-Pro.AppImage
下载完成后,双击运行或者使用下面命令进行运行:
./PrometheusGroundStation-Pro.AppImage
运行无误后会弹出校验窗口:
校验码获取可参考下方。
运行完成后关闭地面站软件。
配置文件下载(可选)
注意
进行该步骤之前,请先保证已经正常打开过一次地面站,并且当前地面站处于关闭状态。
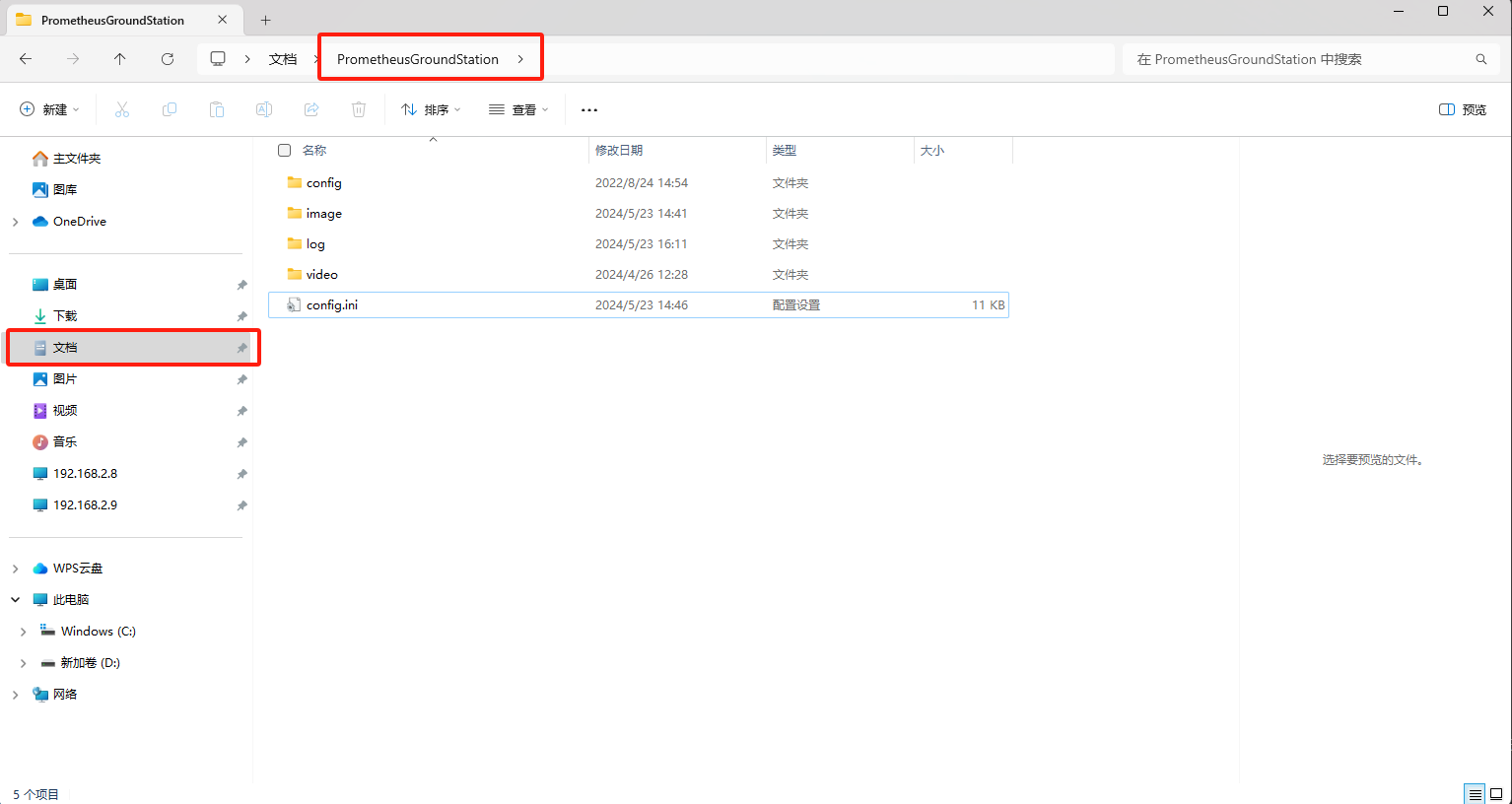
首先检查存放配置文件路径是否创建,如下图:
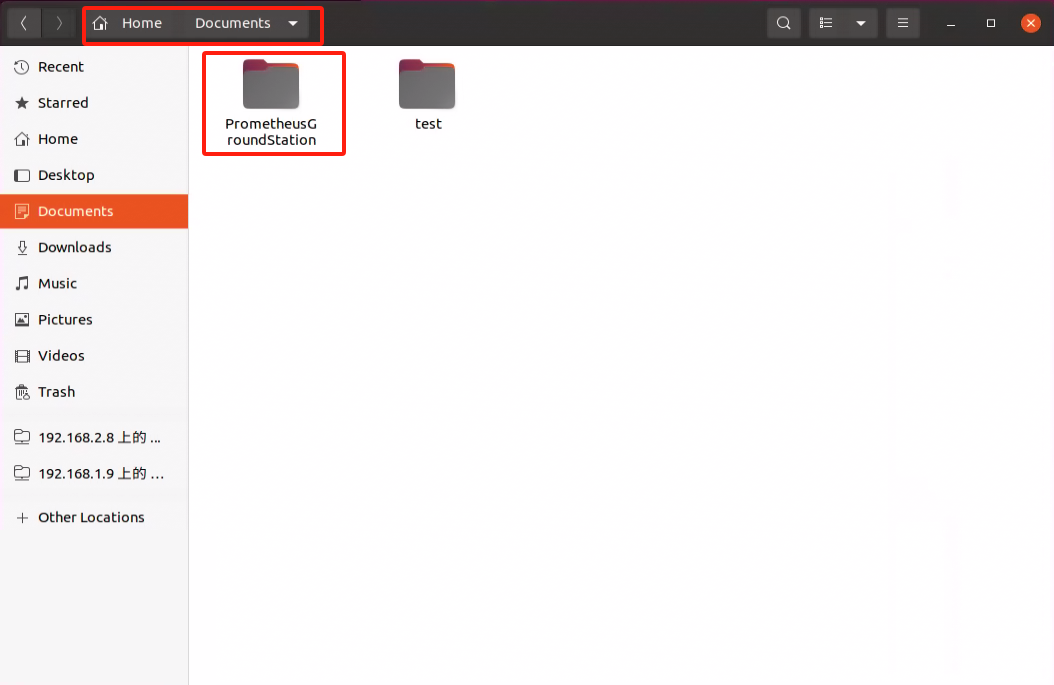
如果是系统语言为中文,则在根目录下文档路径下。
然后下载配置文件:
真实GPS地图相关(如果只进行室内飞行可不下载):地图配置文件下载
rviz三维数据可视化相关(如果不使用路径规划相关功能可不下载):rviz模块下载
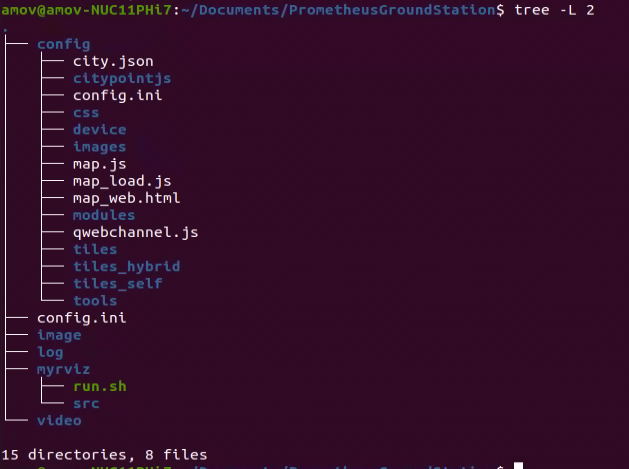
下载完成后解压到根目录下的/Documents/PrometheusGroundStation/中(~/Documents/PrometheusGroundStation/),解压完成后结构目录如下图:。
编译rviz功能包(如果不使用路径规划相关功能可不编译):
# 需要ROS环境,如果不是特别需求,推荐小鱼ROS一键安装
# 安装环境
sudo apt install ros-melodic-qt-build
sudo apt install ros-noetic-rosbridge-server
# 进入路径编译
cd ~/Documents/PrometheusGround/myrviz
catkin_make
配置成功测试
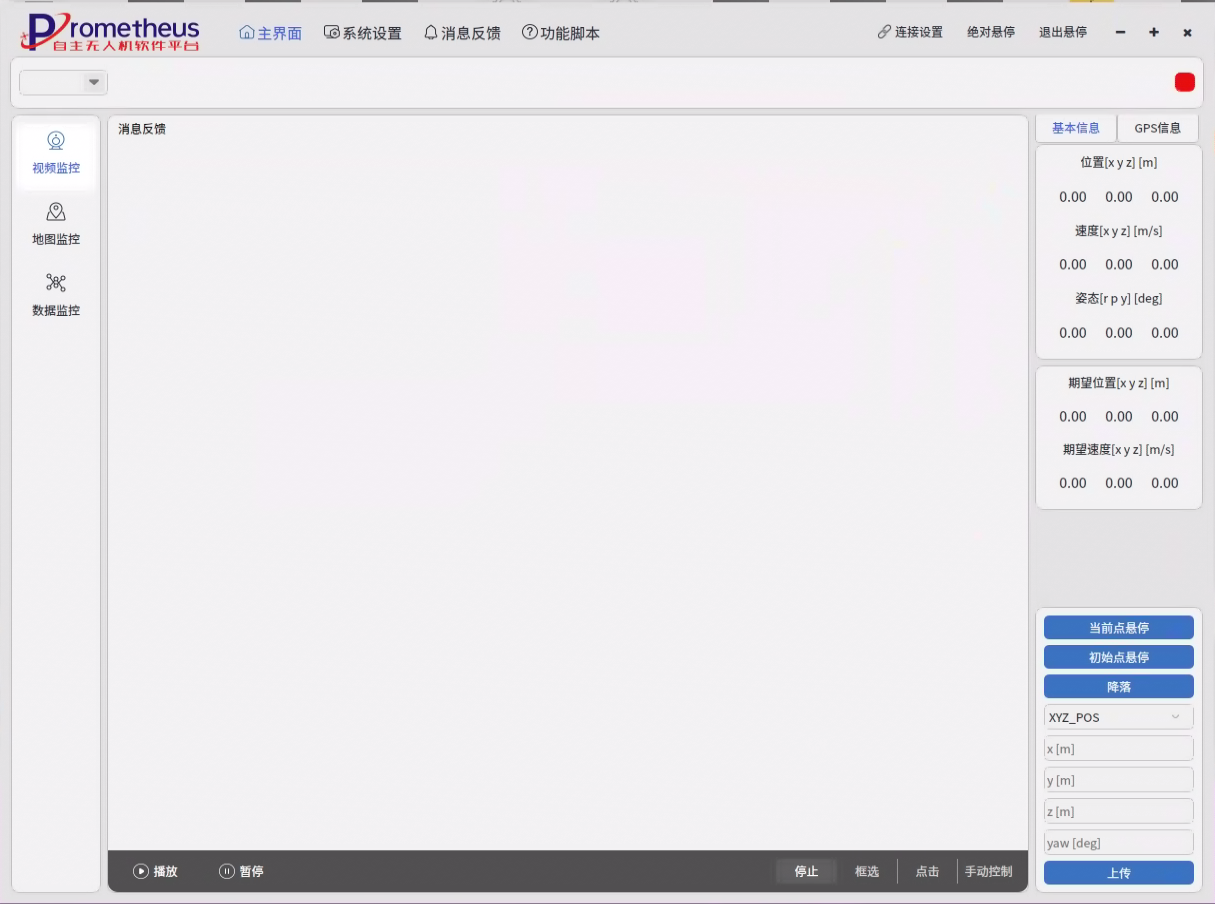
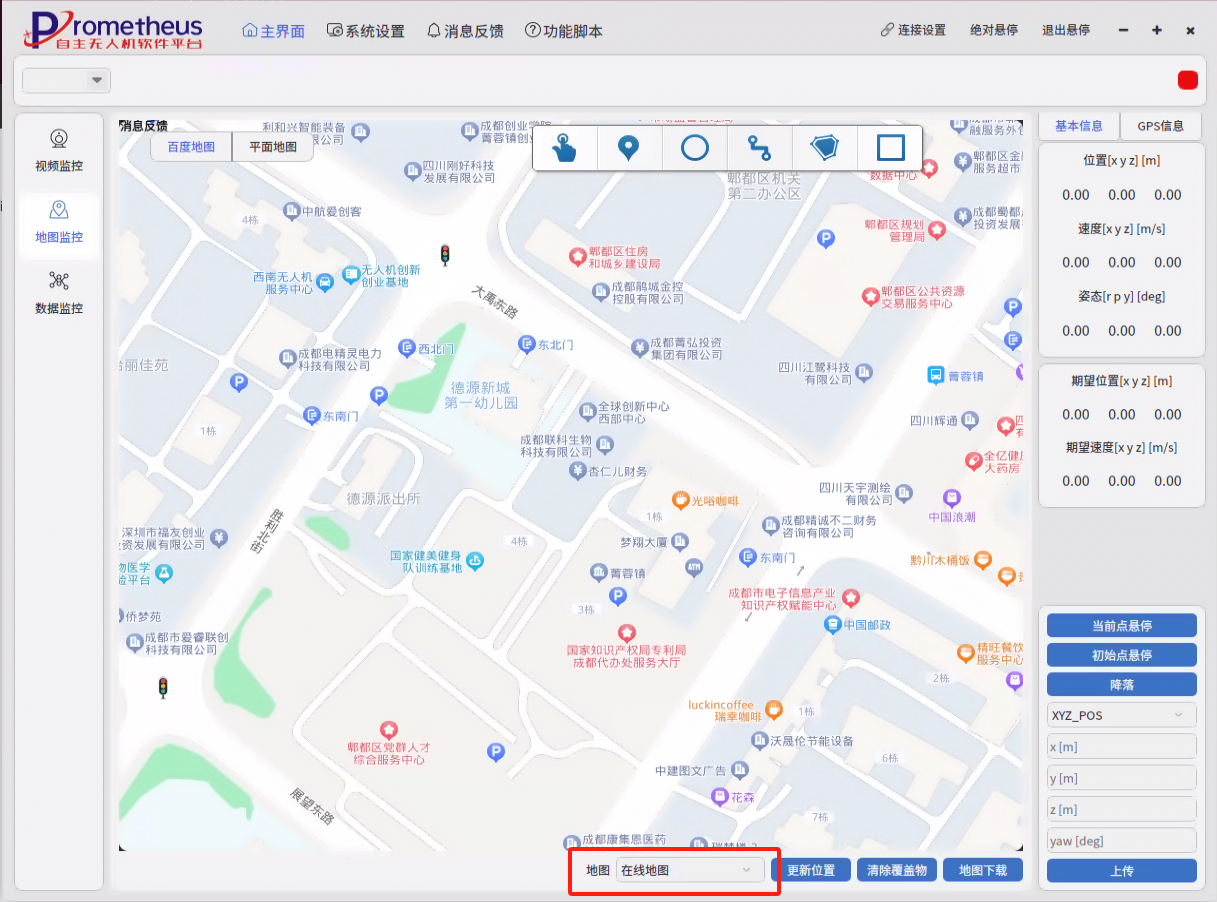
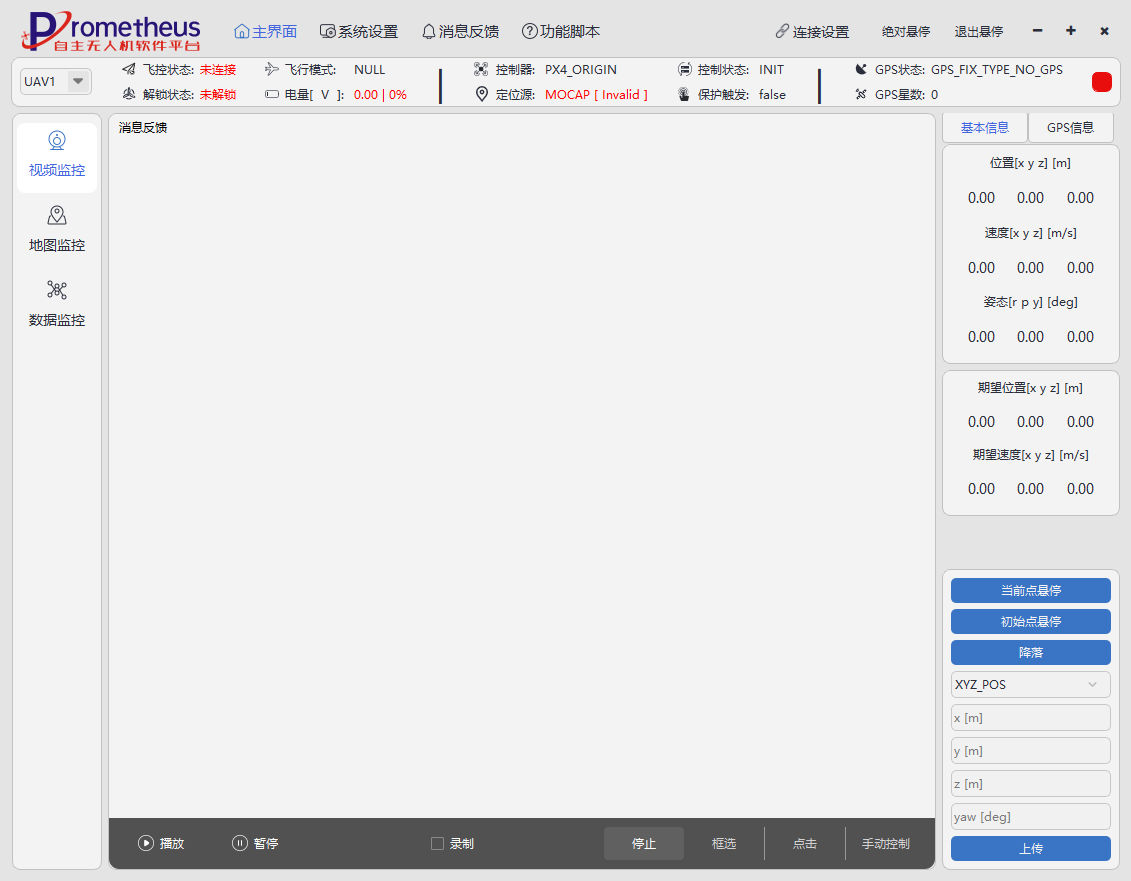
测试真实地图是否正常,首先打开地图监控,查看是否有了地图(如果没有连接网络,可以选择离线地图),如下图:
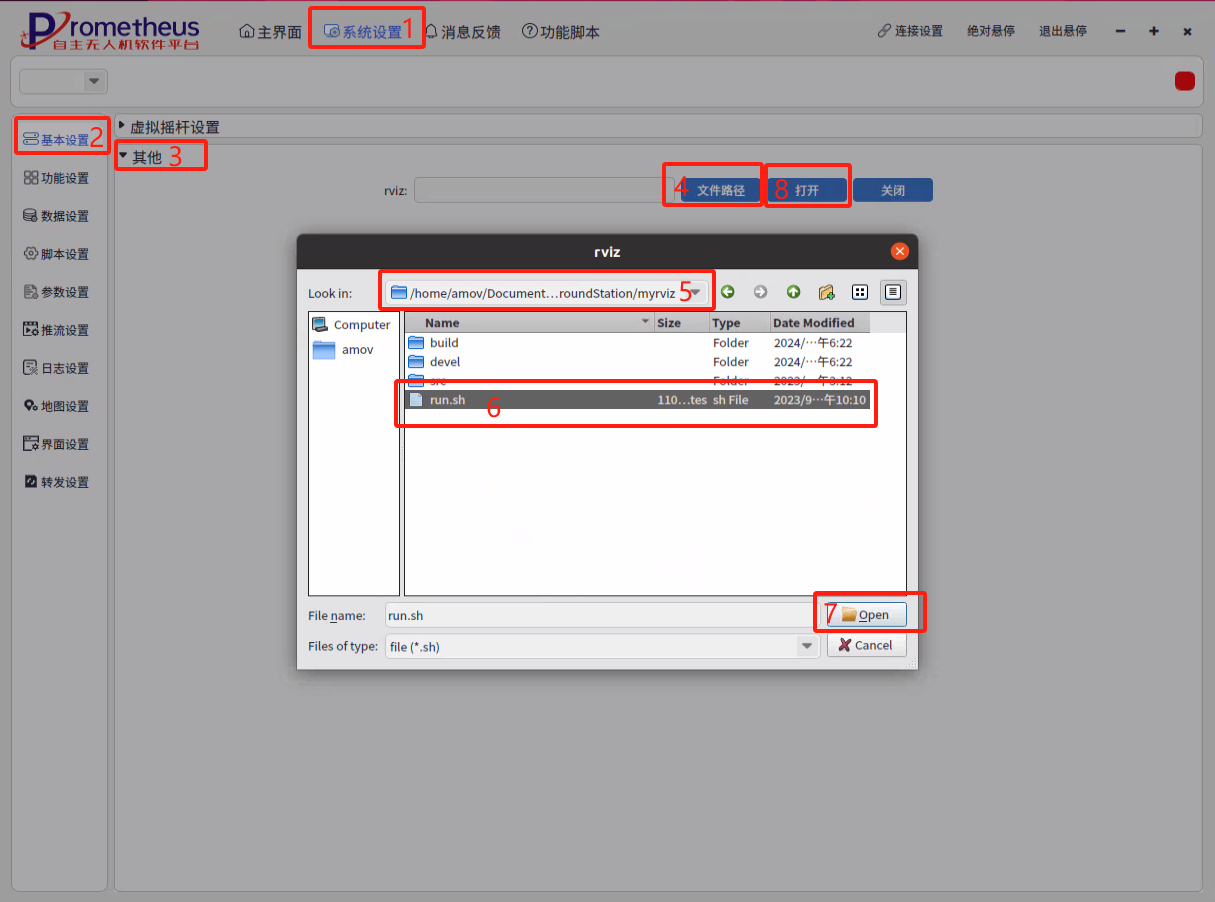
测试rviz模式是否正常,具体操作流程参考如下:
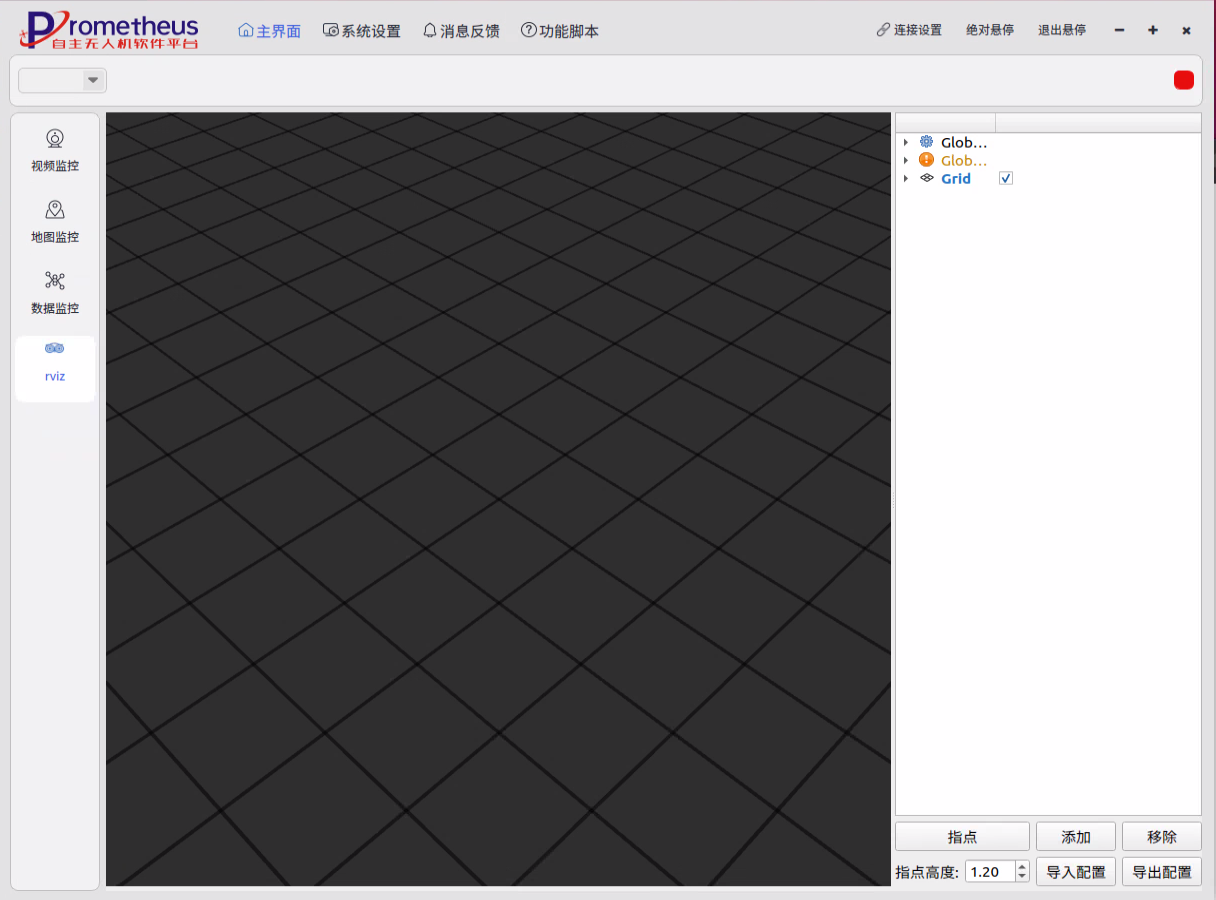
点击开启按钮跳转到主界面出现rviz界面,即配置成功,如下图:
Windows版本
地面站下载运行
下载完成后将其解压在任意位置(建议不要放在C盘),解压完成进入文件夹,找到PrometheusGroundStation.exe文件,然后操作如下:
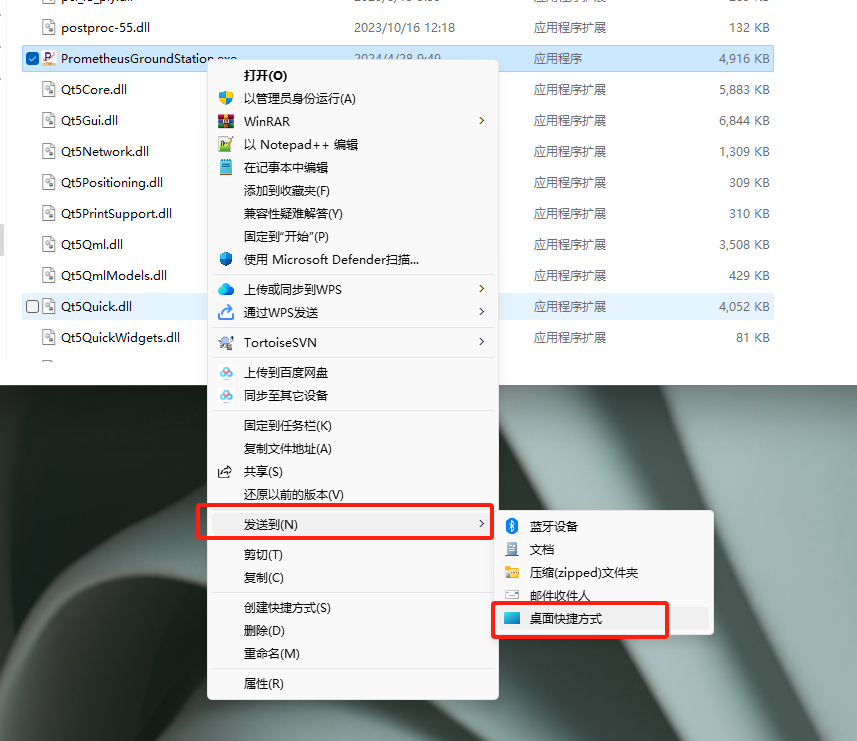
此时可以在桌面文件中找到 PrometheusGroundStation.exe - 快捷方式 ,双击运行。
运行无误后会弹出校验窗口:
校验码获取可参考下方。
运行完成后关闭地面站软件。
配置文件下载(可选)
注意
进行该步骤之前,请先保证已经正常打开过一次地面站,并且当前地面站处于关闭状态。
真实GPS地图相关(如果只进行室内飞行可不下载):地图配置文件下载
下载完成后解压到系统文档路径下的PrometheusGroundStation文件夹中(~/文档/PrometheusGroundStation/),如下图:
配置成功测试
测试真实地图是否正常,首先打开地图监控,查看是否有了地图(如果没有连接网络,可以选择离线地图),如下图:
校验码获取
可以通过Star收藏Prometheus开源自主无人机软件系统平台,然后获取。
首先进入Prometheus代码仓库。

然后将Star后截图发送给阿木实验室-嘉月确认。

联系阿木实验室-嘉月,可以扫描下方二维码。
