仿真中的遥控器使用说明
在真实飞行过程中,我们使用真实的遥控器作为控制无人机的主要操作来源,遥控器始终拥有最高的权限,精湛的遥控器操作手法可以保证无人机安稳着陆,但对于很多非专业来说,遥控的操作技巧是需要不断的练习的。我们始终强调一个观念,仿真与实机结合,这样更加符合开发流程,在以往的仿真中,我们通过键盘控制无人机飞行,并不能真实的反应出实机飞行时该怎么操作,也是基于现在存在的种种问题,为了让仿真与实机结合的更加完美,在Prometheus中增加遥控器控制方式,与真机使用更加对应起来,更加容易上手进行二次开发。
遥控器通道和方向
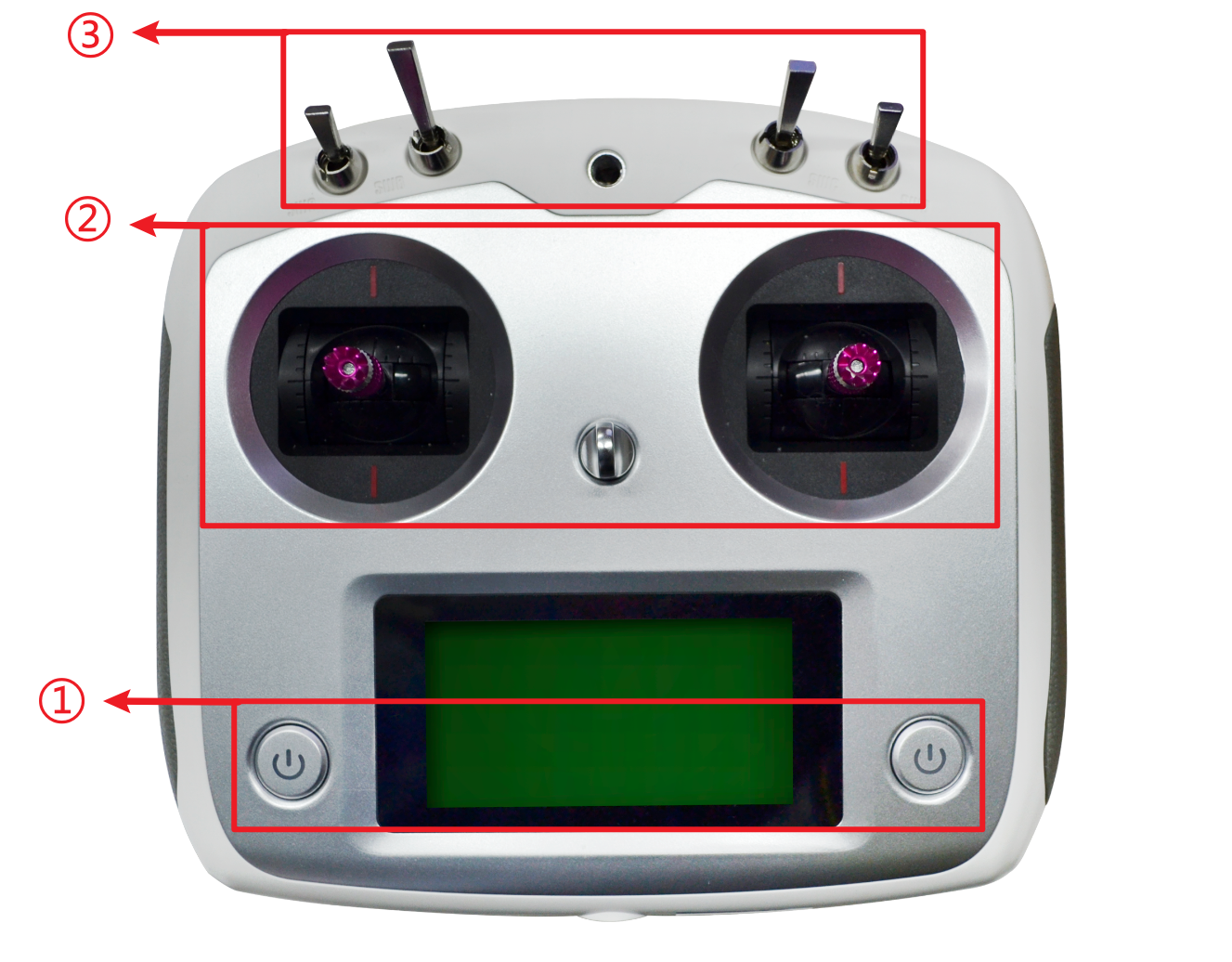
- 开关机按钮,开关机需要同时按下两个按钮,开机时需要所有档杆开关打至最上端
- 摇杆
- 档杆开关,从左到右依次为SWA、SWB、SWC、SWD
| 遥控器 | 通道 | 含义 |
|---|---|---|
| 右摇杆(左右) | 通道1 | 滚转(向左推,无人机向左移动) |
| 右摇杆(上下) | 通道2 | 俯仰(向上推,无人机向前飞) |
| 左摇杆(上下) | 通道3 | 油门(向上推,无人机向上飞) |
| 左摇杆(左右) | 通道4 | 偏航(向左推,无人机向左转弯) |
| SWA(两段开关) | 通道5 | 解锁/上锁开关 |
| SWB(三段开关) | 通道6 | Prometheus控制模式切换,分别对应INIT-RC_POS_CONTROL-COMMAND_CONTROL |
| SWC(三段开关) | 通道7 | KILL开关,也可以留作用户自定义 |
| SWD(两段开关) | 通道8 | Prometheus中的LAND模式 |
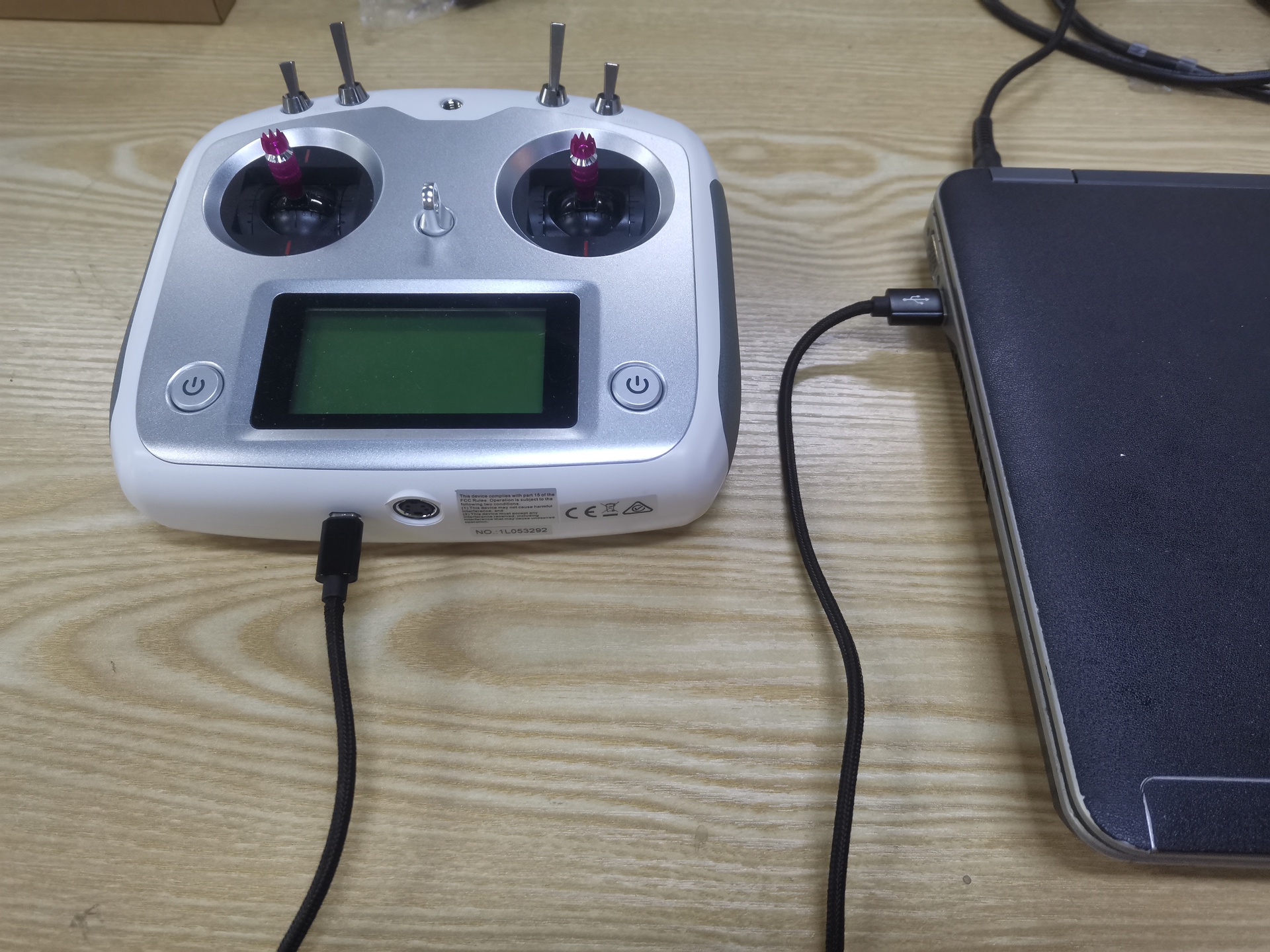
仿真电脑和遥控器连接
仿真电脑和遥控器通过Micro USB数据线连接
Micro USB数据线

仿真电脑与遥控器连接图
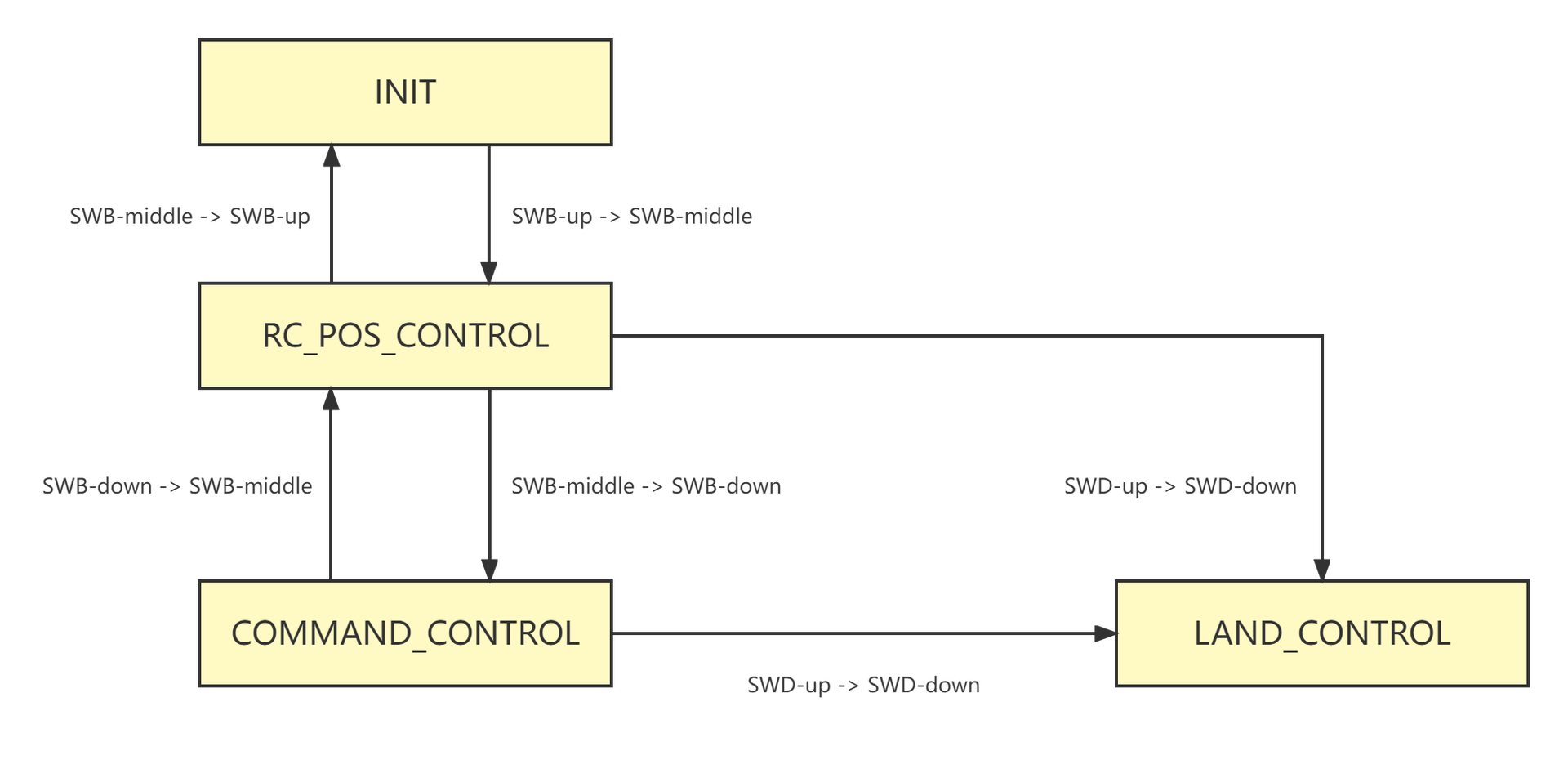
Prometheus控制模式包含四种,分别是INIT、RC_POS_CONTROL、COMMAND_CONTROL、LAND_CONTROL下图为无人机运行时的控制状态机图
无人机各种情况下的操作说明
无人机档杆情况说明
SWA/SWC/SWD档杆都属于触发型,而SWB档杆属于维持型,SWA档杆执行解上锁操作,触发解锁操作需要从上往下拨这个动作,而不是SWA档杆处于底部,而SWB切换到某一模式,是因为档杆处于那个位置,而不是拨的动作。
无人机未解锁时
1.仅能通过SWA档杆进行解锁上锁操作,SWB档杆无法切换控制模式,SWD无法切换到降落模式。
2.将SWB档杆拨到中间位置时,无人机解锁后会直接进入RC_POS_CONTROL,而直接拨到底部位置时,无人机解锁后无法进入COMMAND_CONTROL,因为需要先进入RC_POS_CONTROL才能切入到COMMAND_CONTROL模式。
无人机解锁并处于INIT(PX4处于Position模式)模式时
1.处于地面时可执行上锁操作。
2.可使用摇杆控制无人机移动。
3.可切入RC_POS_CONTROL模式。
4.无法切入LAND_CONTROL模式(需要在RC_POS_CONTROL或LAND_CONTROL模式下)。
5.无法直接切入COMMAND_CONTROL模式(档杆以及软件都需要先进入RC_POS_CONTROL模式)。
6.将SWB档杆快速切入到COMMAND_CONTROL模式时,会导致系统异常,此时,档杆处于COMMAND_CONTROL模式,但无人机上一状态为INIT模式,导致无人机无法正常进入COMMAND_CONTROL模式。
无人机解锁并处于RC_POS_CONTROL(PX4处于OFFBOARD模式)模式时
1.无人机此时会离地一定高度,不能上锁。
2.可切入LAND_CONTROL。
3.可切入COMMAND_CONTROL。
无人机解锁并处于COMMAND_CONTROL(PX4处于OFFBOARD模式)模式时
1.可切入LAND_CONTROL。
2.可切入RC_POS_CONTROL。
3.将SWB档杆快速移动至顶端可直接切入到INIT模式。
无人机遥控器操作正常流程
1.将SWA/SWB/SWC/SWD档杆全部打到最顶端。
2.启动相关功能代码脚本。
3.将SWA档杆切入到底端进行解锁。
4.无人机解锁后将SWB档杆切入到RC_POS_CONTROL模式,缓慢升高到一定高度。
5.将SWB档杆切入到COMMAND_CONTROL模式,无人机进行自主飞行。
6.自主飞行任务结束后将SWD档杆拨到底端,无人机自主降落。
无人机定位异常无法正常飞行
1.此时无人机将触发保护机制,进行快速降落。
2.如果快速降落依然存在安全风险或无人机已经失控,则将SWC档杆向下拨,无人机电机将停转。
无人机在COMMAND_CONTROL模式下需要人为接管
1.将SWB档杆拨到中间位置或最顶端位置切换至RC_POS_CONTROL或INIT人为进行操作。