Ubuntu系统
提示
Prometheus支持Ubuntu18.04以及Ubuntu20.04操作系统
工具准备
- Rufus软件
- Usb3.0接口U盘一个,推荐容量大于16G
- Ubuntu18.04桌面版镜像文件
Rufus下载
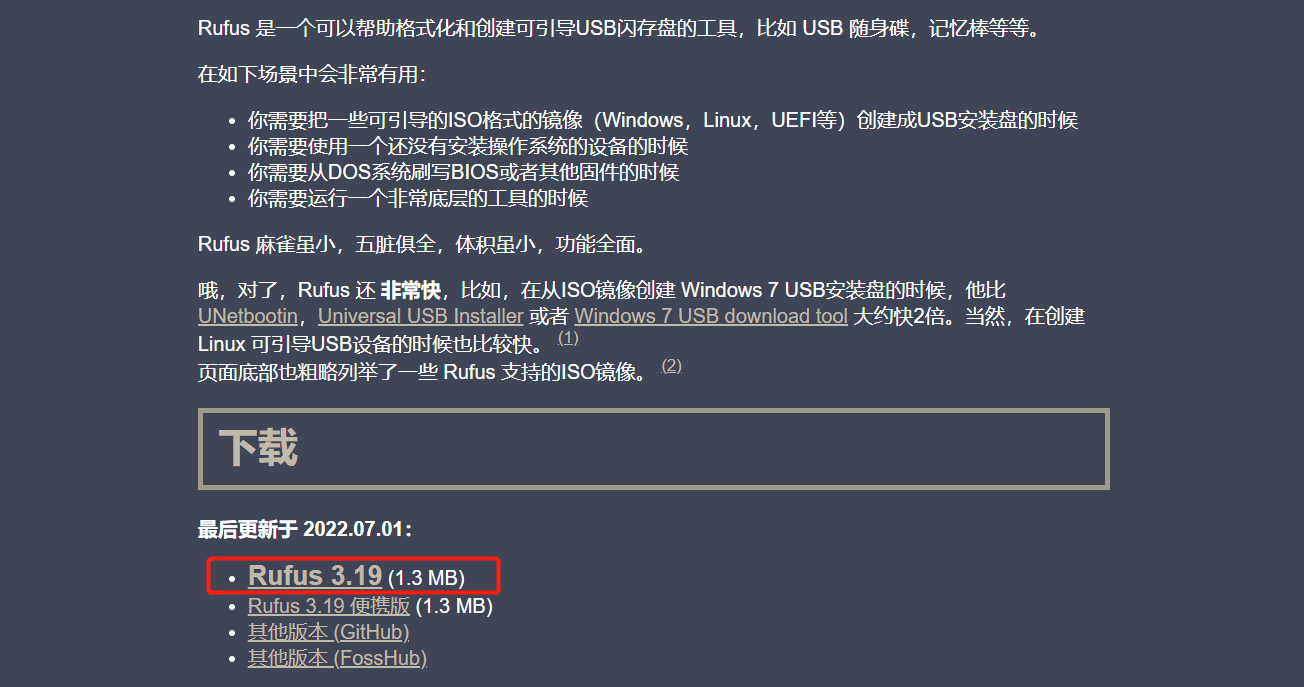
点击链接下载安装Rufus软件,选择图示版本。
Ubuntu系统镜像下载
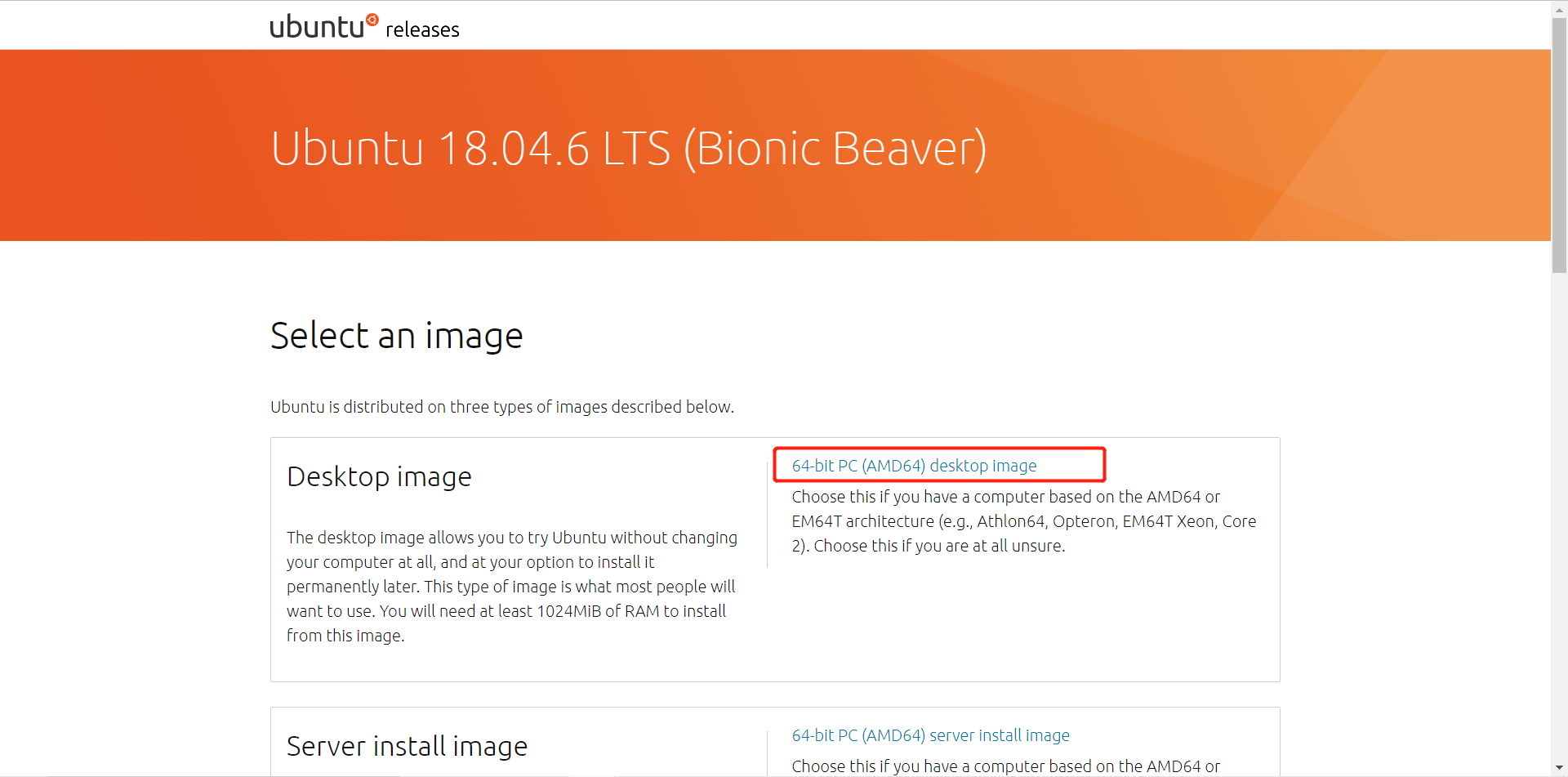
Ubuntu18.04
点击链接下载安装Ubuntu18.04系统镜像,选择桌面版镜像,并设置好下载路径确保能找到镜像。
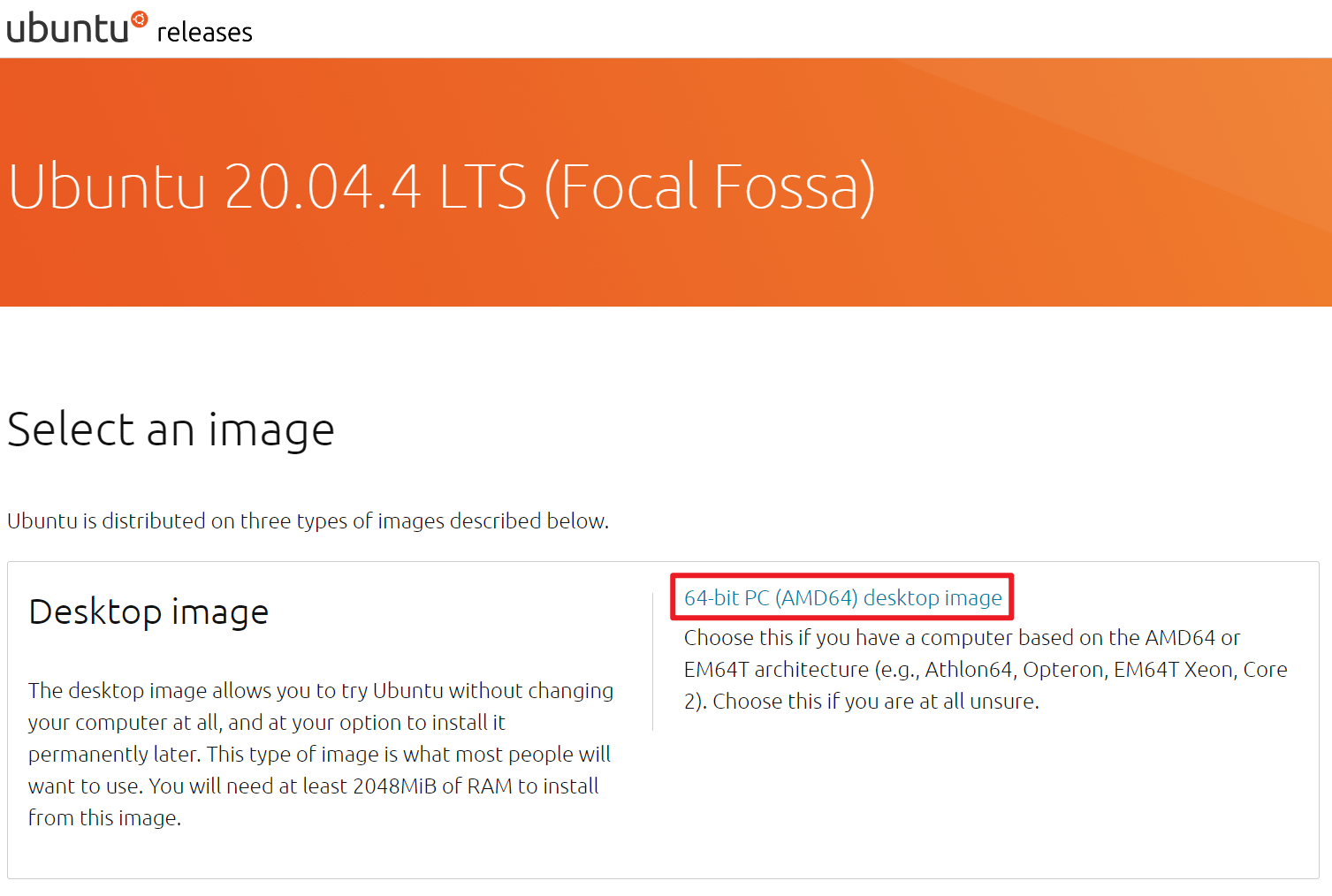
Ubuntu20.04
系统启动盘制作
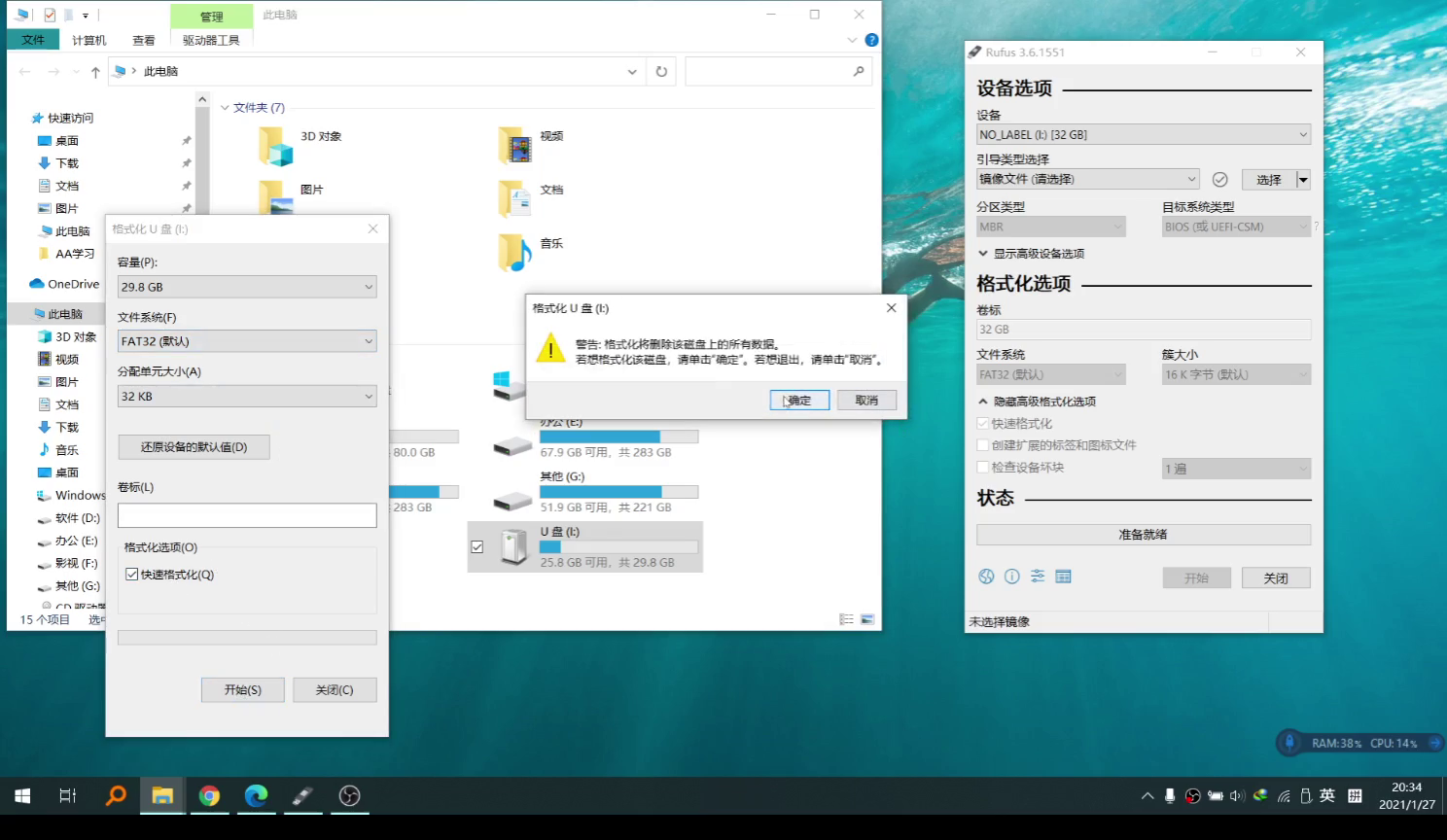
格式化U盘
警告
在格式U盘之前一定要备份好U盘中的数据!!!!
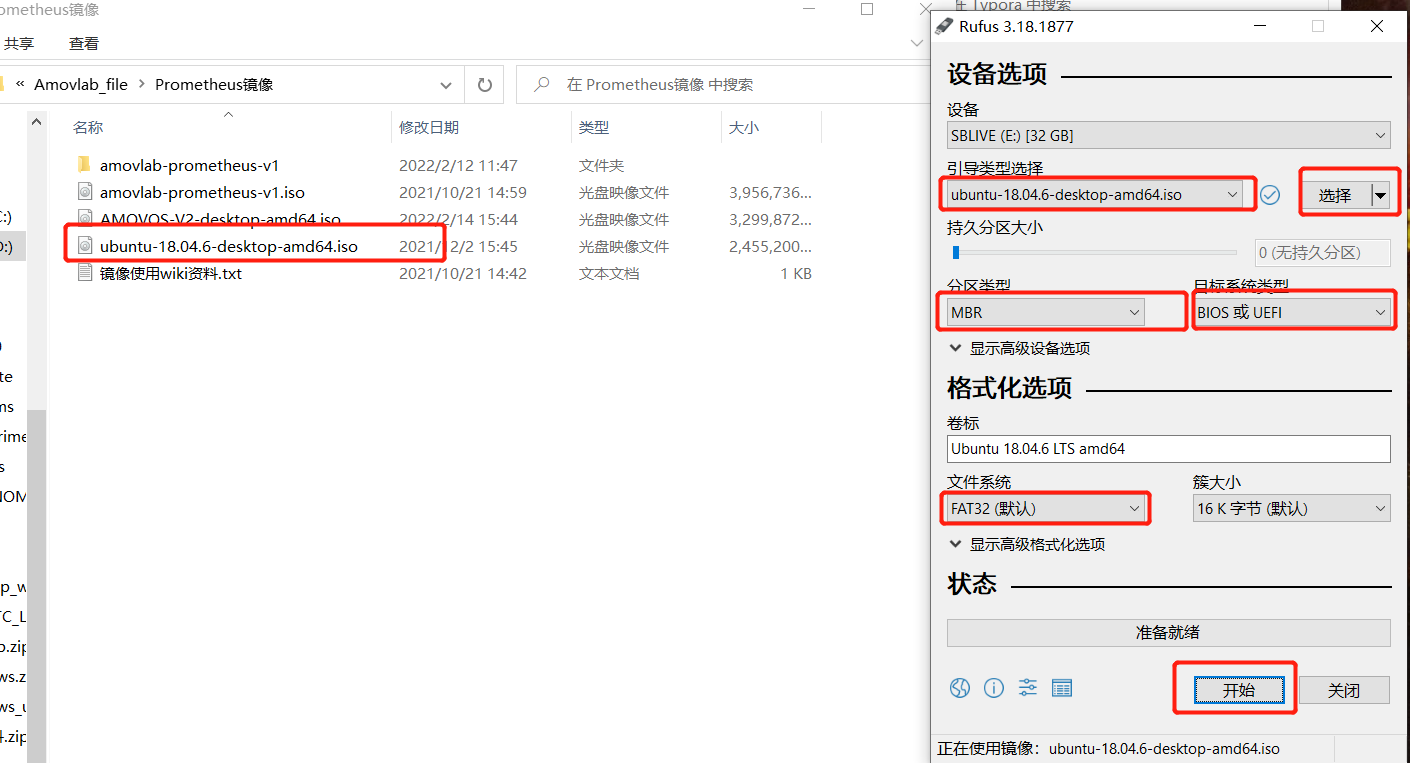
Rufus软件使用
使用Rufus软件制作启动盘。选择对应的U盘,选择下载好的Ubuntu镜像文件,其余设置与图示相同。等待制作完成关闭即可。
系统安装
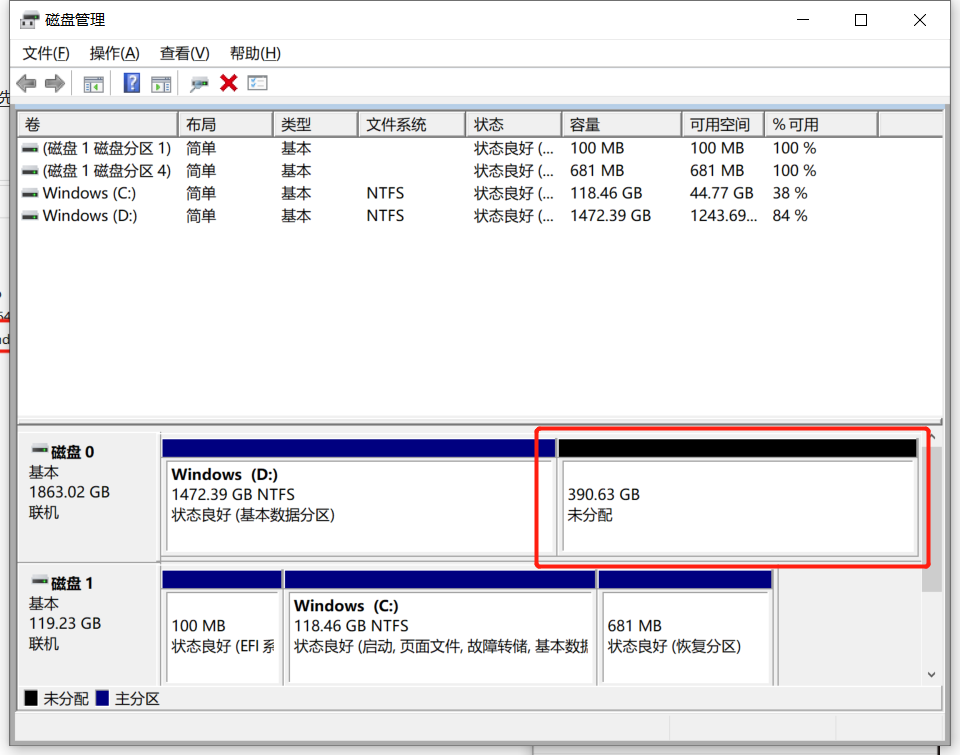
若为双系统安装,需压缩硬盘留出系统安装空间,单系统安装可跳过。
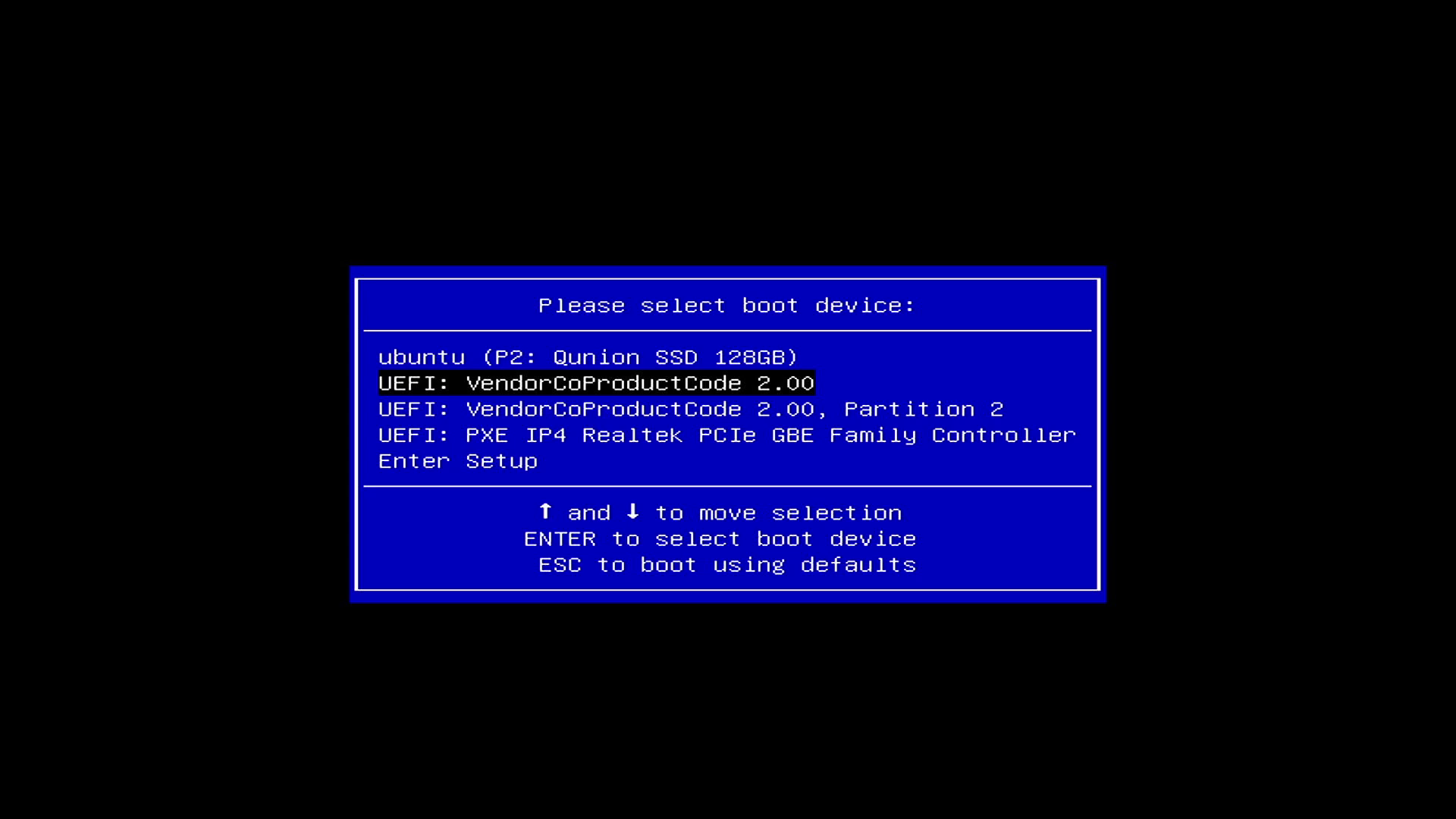
将U盘插上电脑、重启,在出现品牌logo时按F7进入boot模式,选择启动介质。
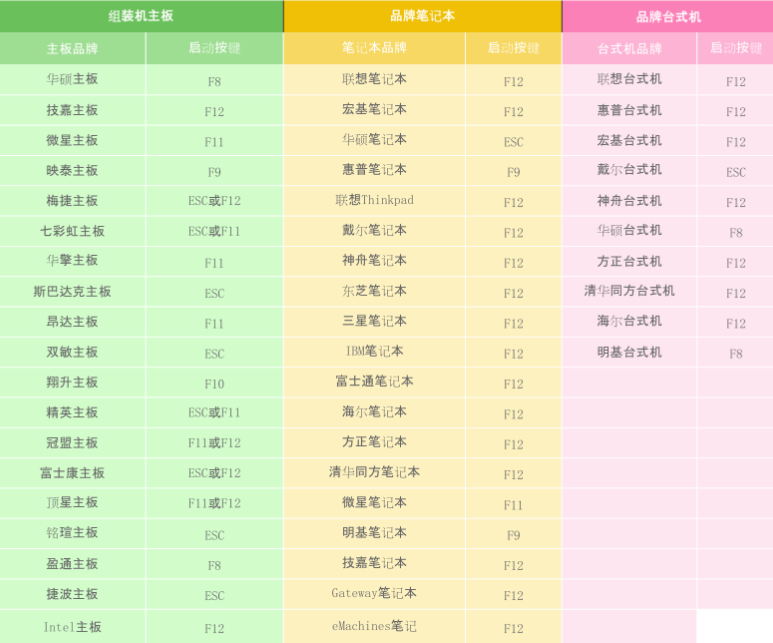
提示
不同品牌电脑,进入boot模式按键不同,可对照下图操作。
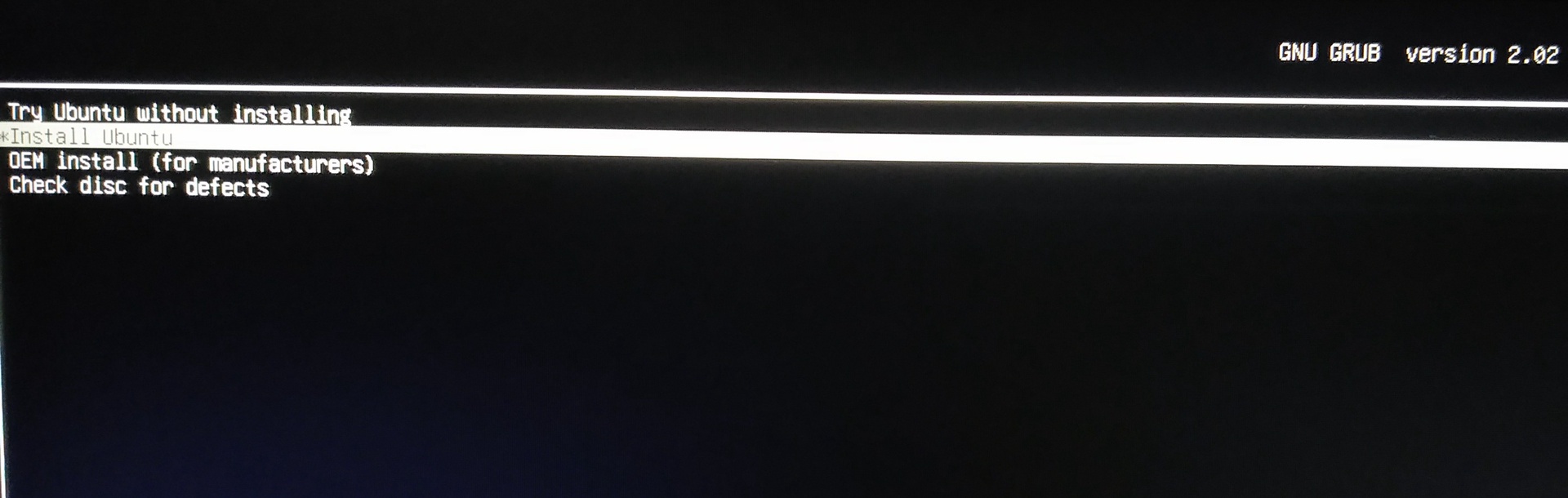
选择启动盘后,选择安装Ubuntu。
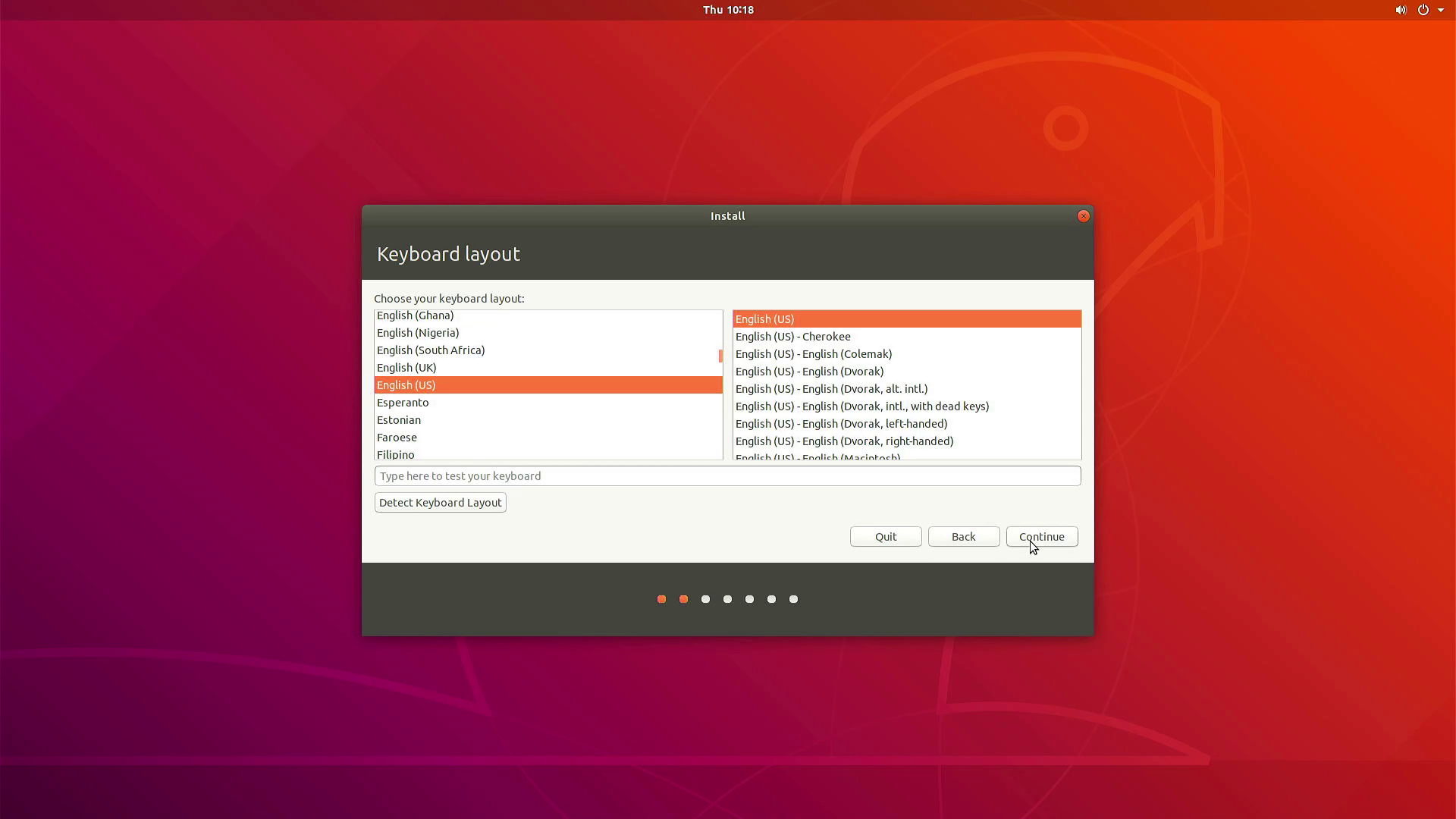
点击继续下一步。
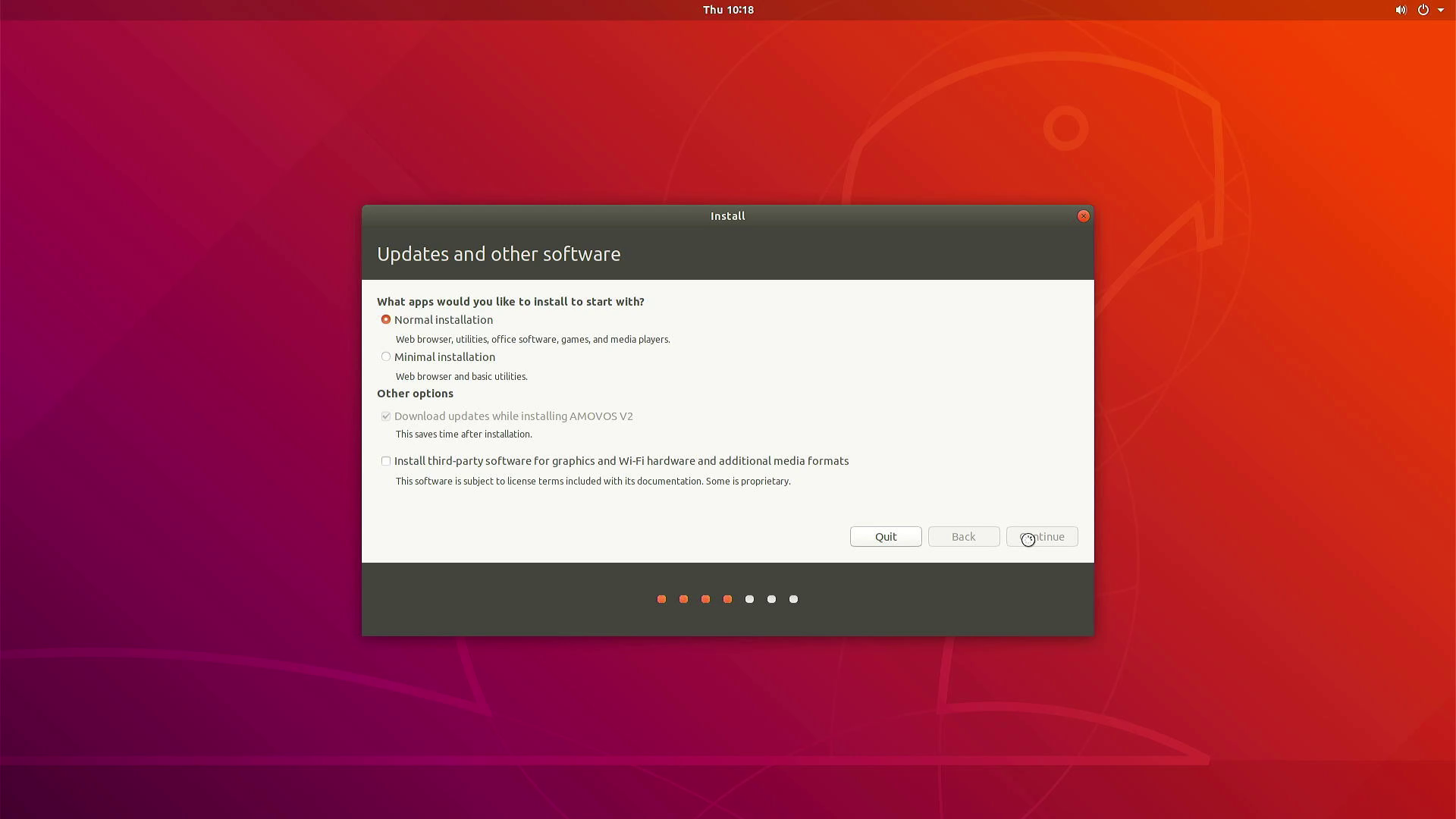
选择Normal installation 选项,如下图所示。
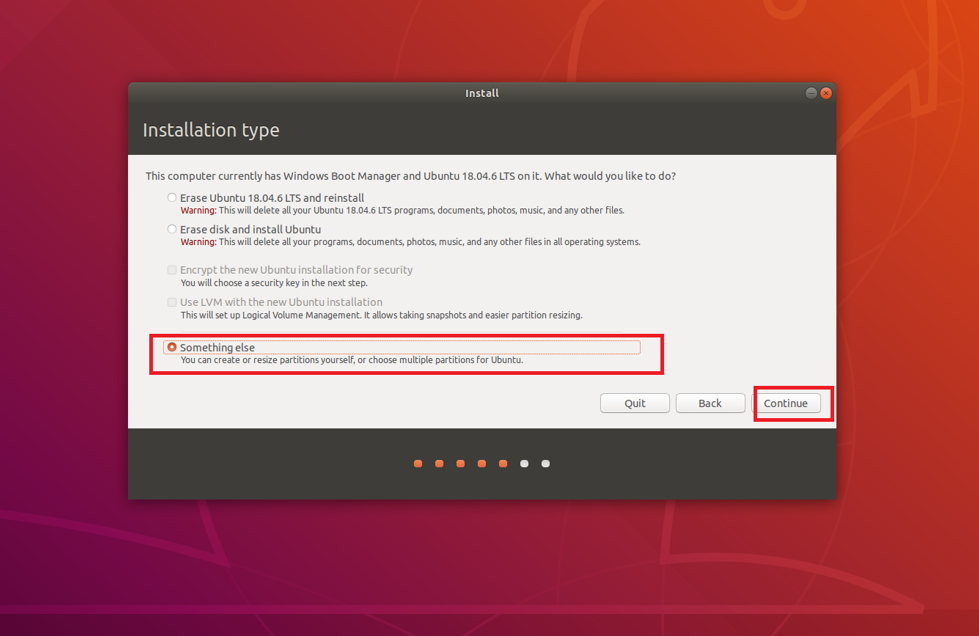
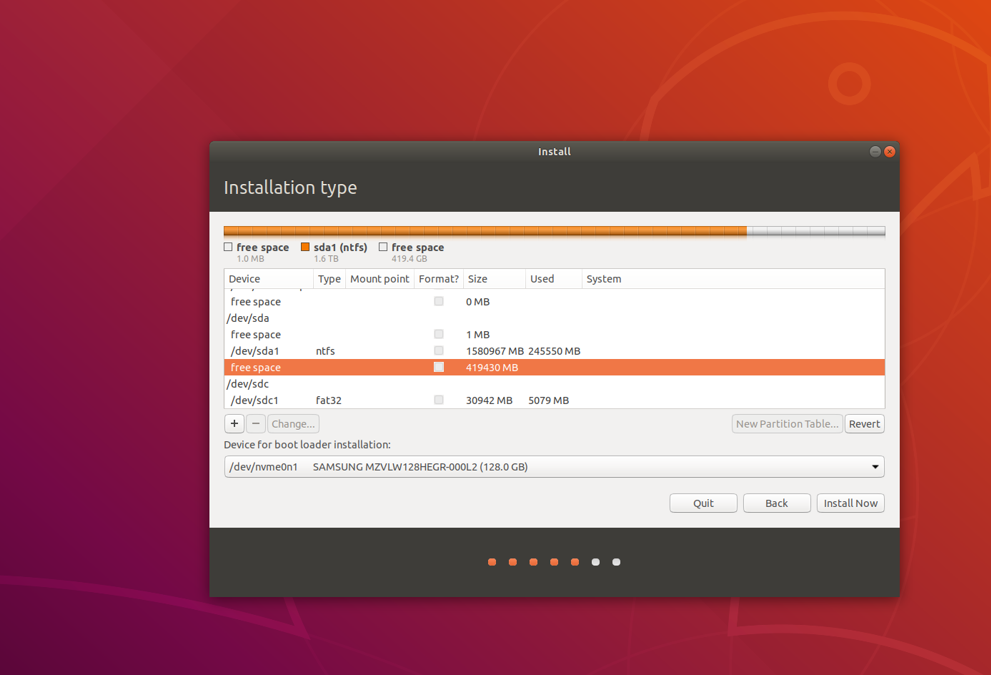
选择Something else 选项,如下图所示。
选择之前预留的存储空间。
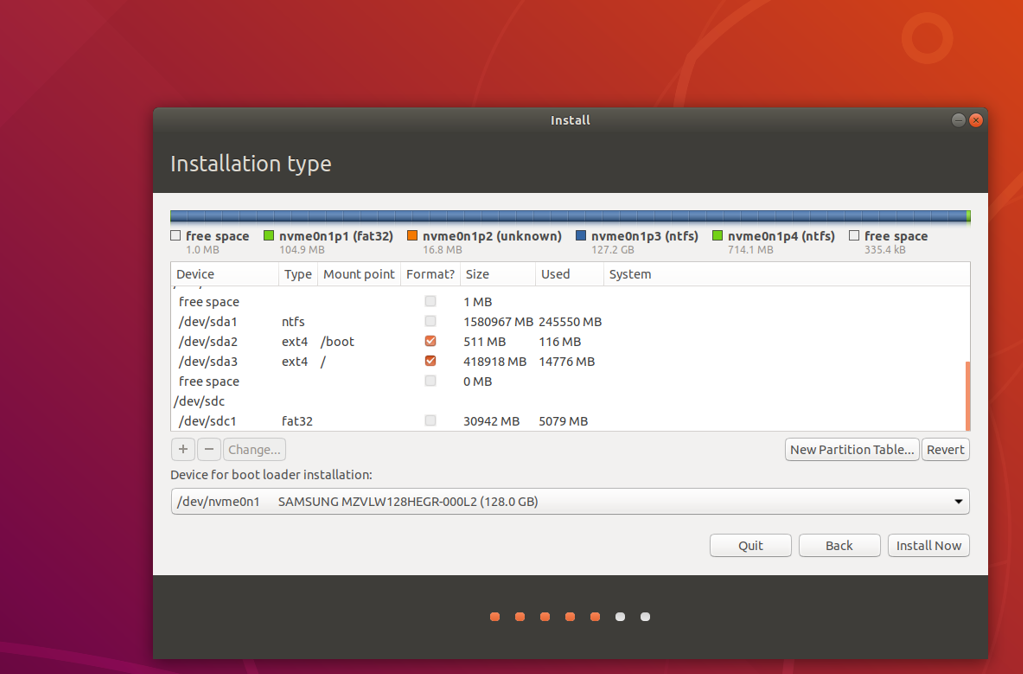
设置分区根据电脑内存和存储不同而不同,具体参见Ubuntu分区,勾选后点击install now。
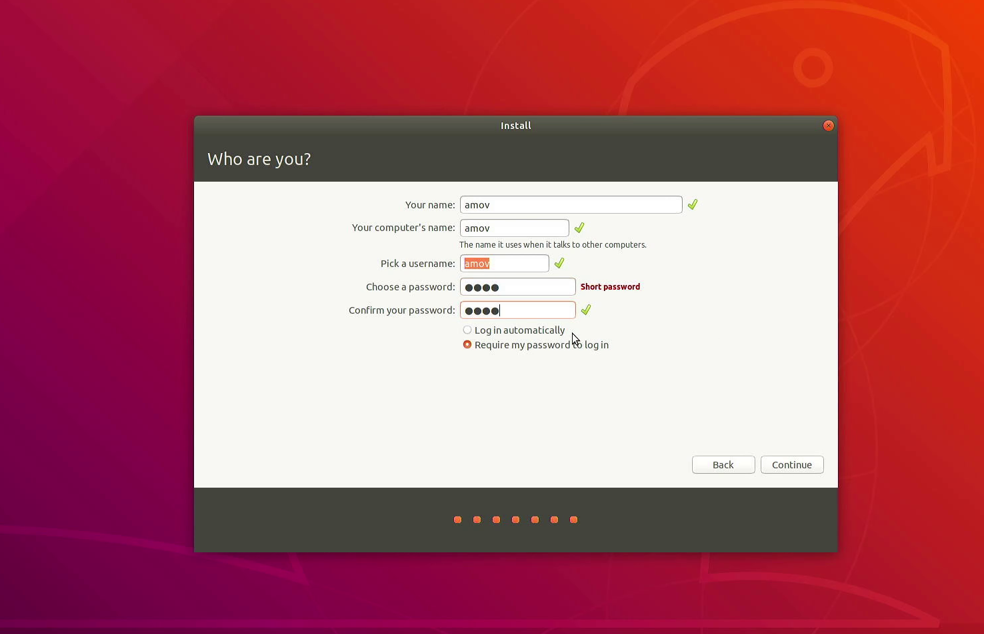
设置用户名及密码,点击继续。
等待安装完成后,重启。
对于Ubuntu使用由于国内网络环境影响,强烈建议更改Ubuntu的源,这里的源是指你使用Ubuntu下载东西时所经过的网络途径,默认是国外源,国内使用很慢,且经常出现下载失败,所以强烈建议改源,建议改为阿里源或者清华源 修改方法参见: 改源的两种方法
提示
ROS官方安装教程已经比较完善,Prometheus使用手册不再详细介绍,可参考官方的进行安装。
需要注意的是官方的安装由于国内网络环境影响可能会出现下载缓慢或者失败,这里也提供国内安装方法
fish一键安装:fish一键安装
国内源安装:国内源安装
Ubuntu18.04: ROS-melodic安装教程
Ubuntu20.04: ROS-noetic安装教程
ROS是否安装好可以通过终端依次输入下面指令,运行小乌龟程序来检验,如果可以正常键盘的↑↓←→键控制小乌龟代表正常ROS安装成功
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key需注意无论哪种安装方式,其中一定包含构建包的依赖,也就是下面这个安装命令,否则后面安装PX4环境会出现问题
Ubuntu18.04依赖包
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essentialUbuntu20.04依赖包
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential