PX4固件以及参数配置
刷写PX4固件
准备内容:
1、一台装有QGC的电脑
2、数据线
3、Z410无人机
提示
prometheus_px4固件位于Prometheus/Experiment文件夹下,找到名为
prometheus_Z410.px4文件,该文件为刷写的PX4固件。
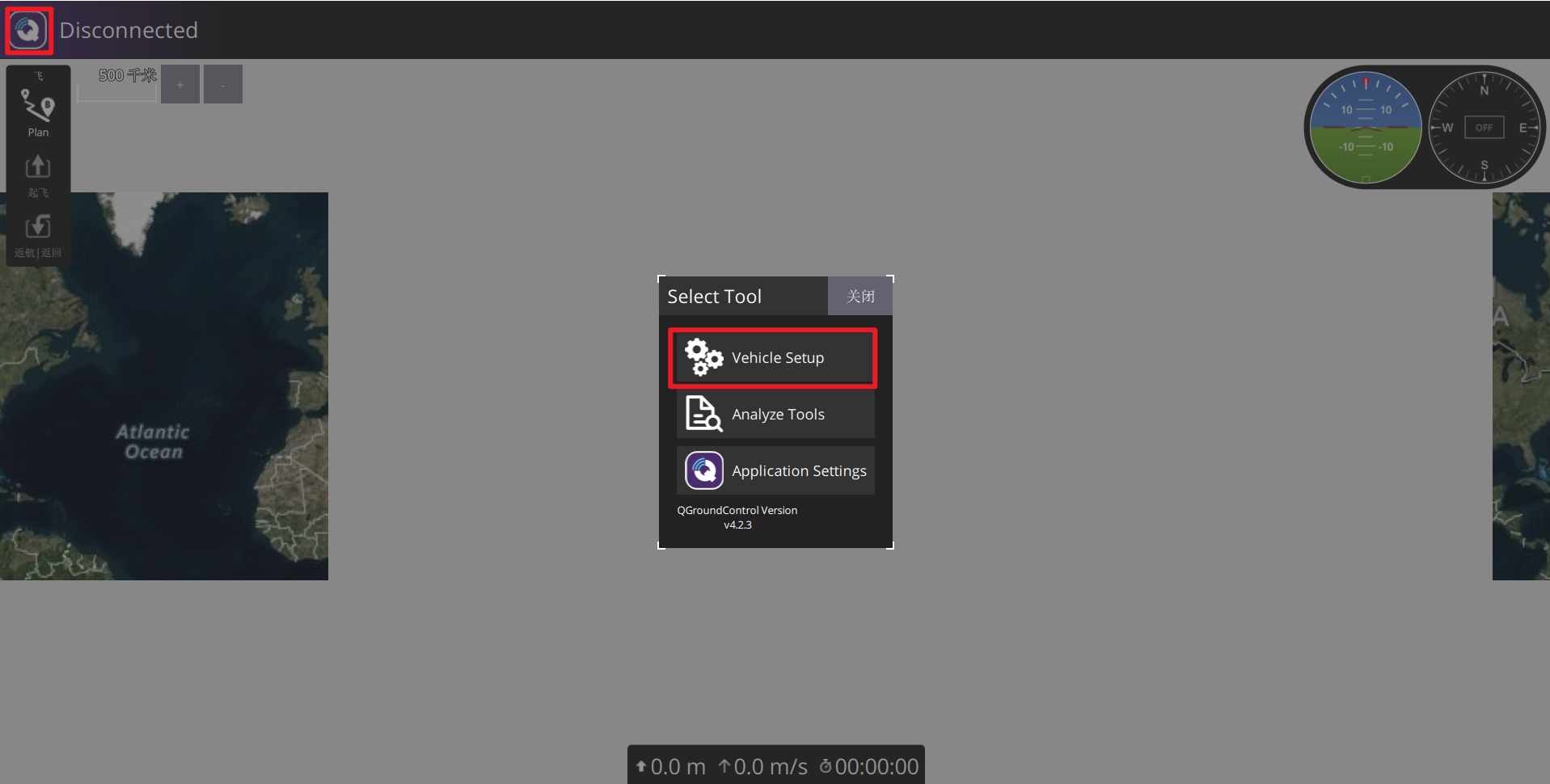
将QGC打开,点击左上角按钮,点击设置,进入固件刷写界面
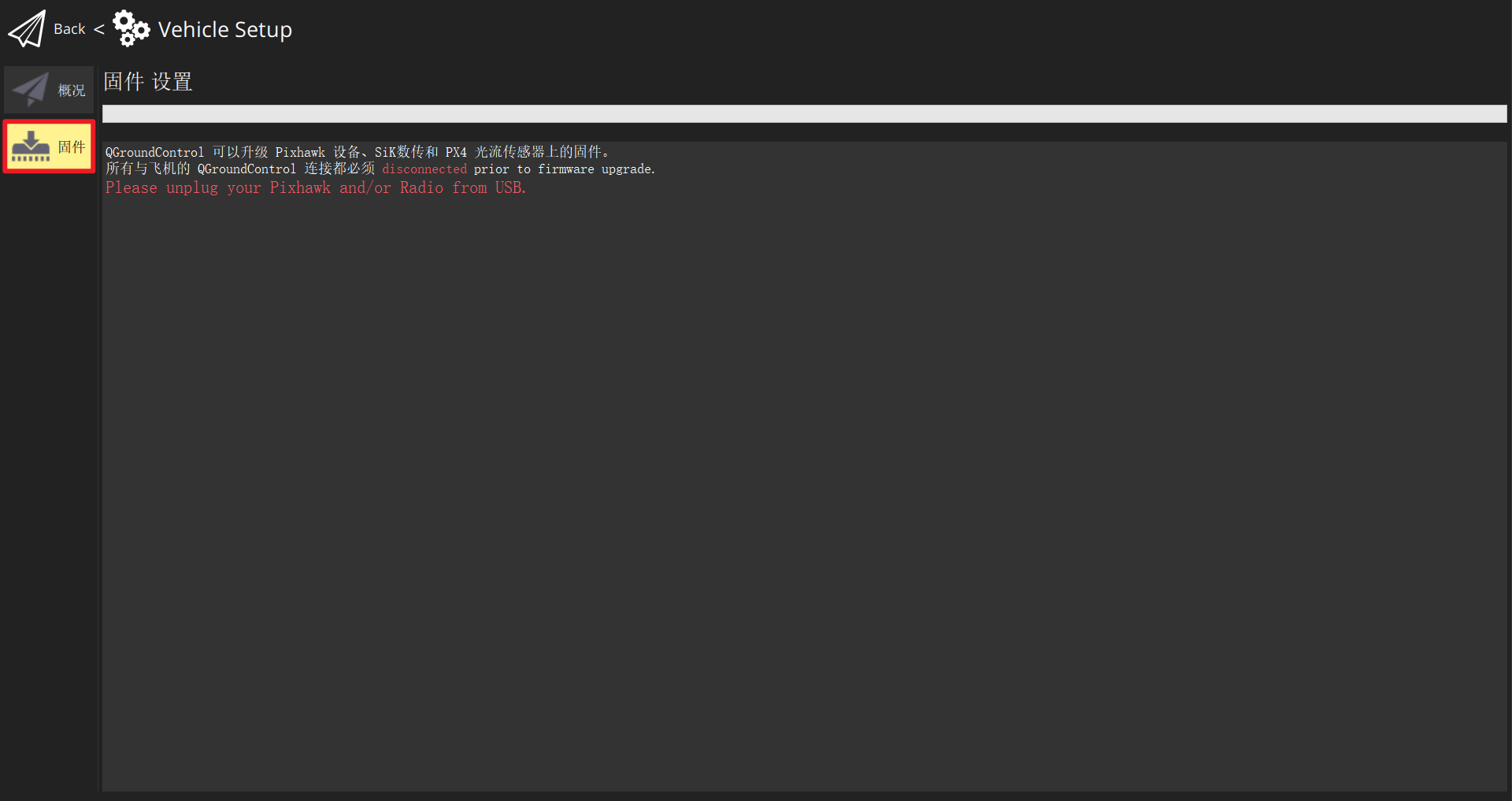
通过数据线将无人机飞控与电脑连接,QGC会弹出固件刷写提示框,点击高级设置,选择自定义固件
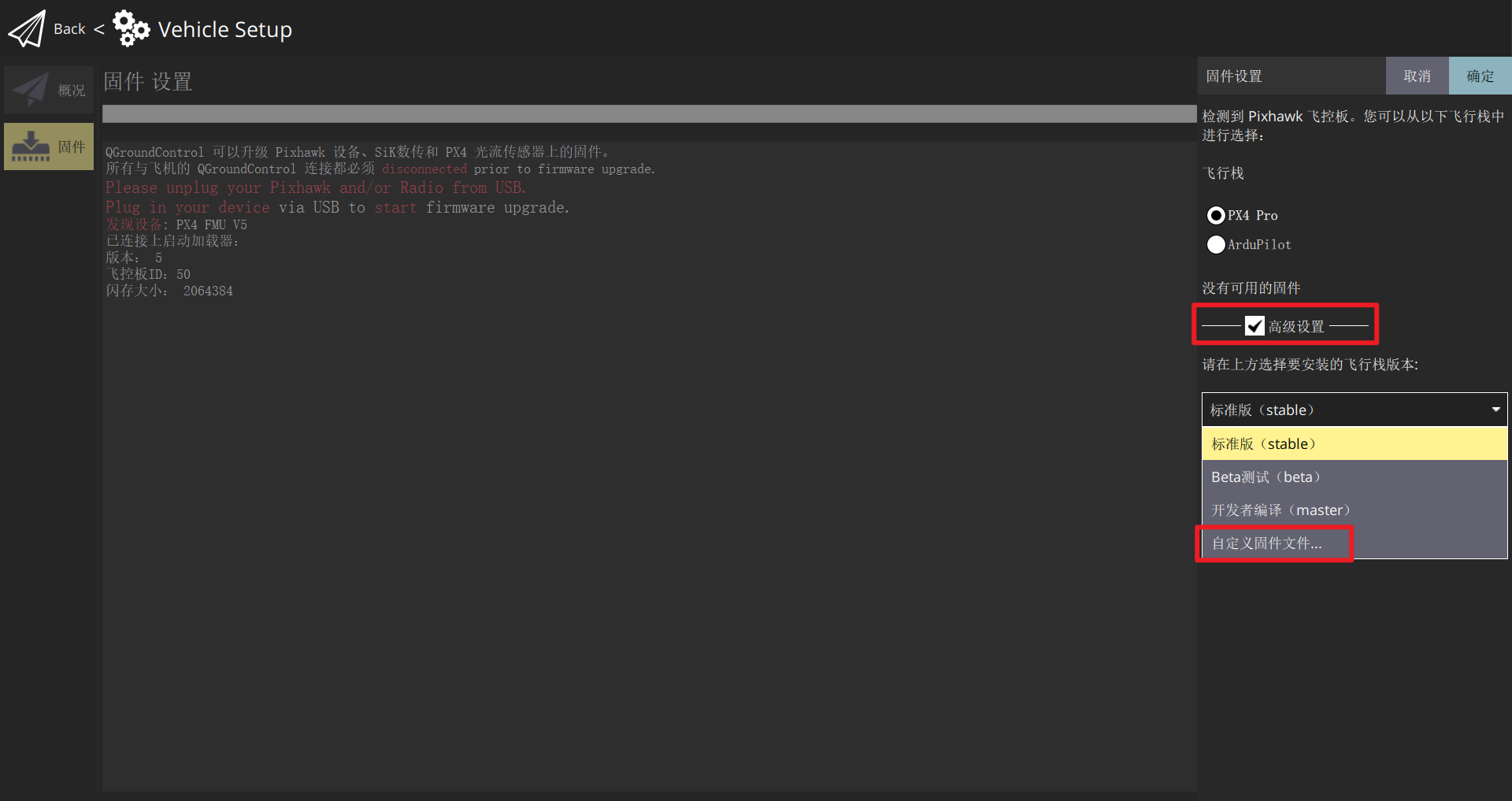
选择prometheus_px4.px4文件,等待刷写完毕即可
PX4参数修改
运行Prometheus真机示例demo前需要确认无人机飞控参数是否正确
将数据线断开后再重新打开QGC,再次插上数据线QGC会自动连接无人机
依然点击左上角按钮,点击设置,点击参数设置界面

-
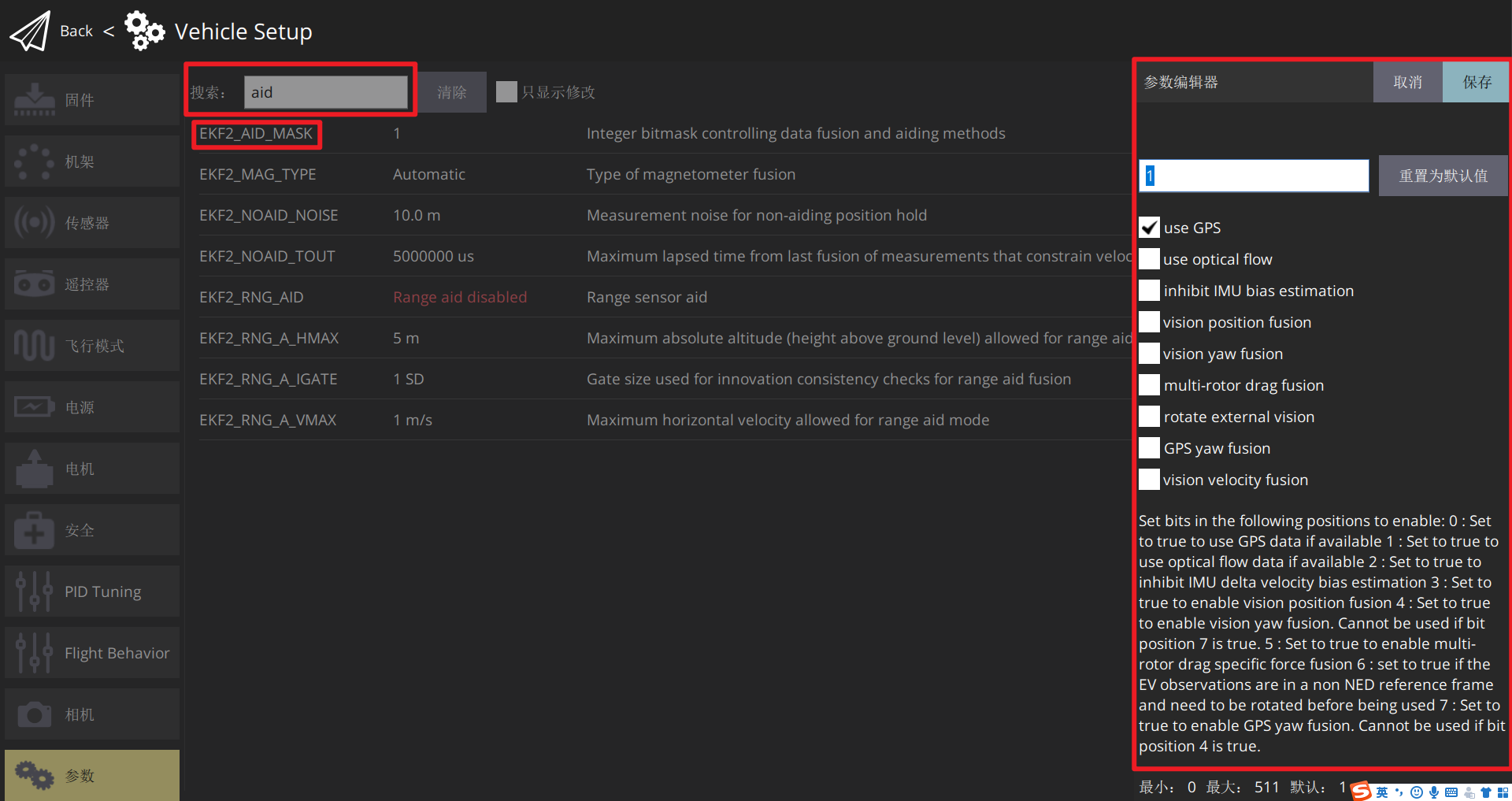
EKF2_AID_MASK
该参数为选择无人机定位数据来源参数,在搜索框内搜索
aid可快速找到该参数,点击参数进入参数设置界面,选择use GPS,将定位数据来源设置为GPS。
-
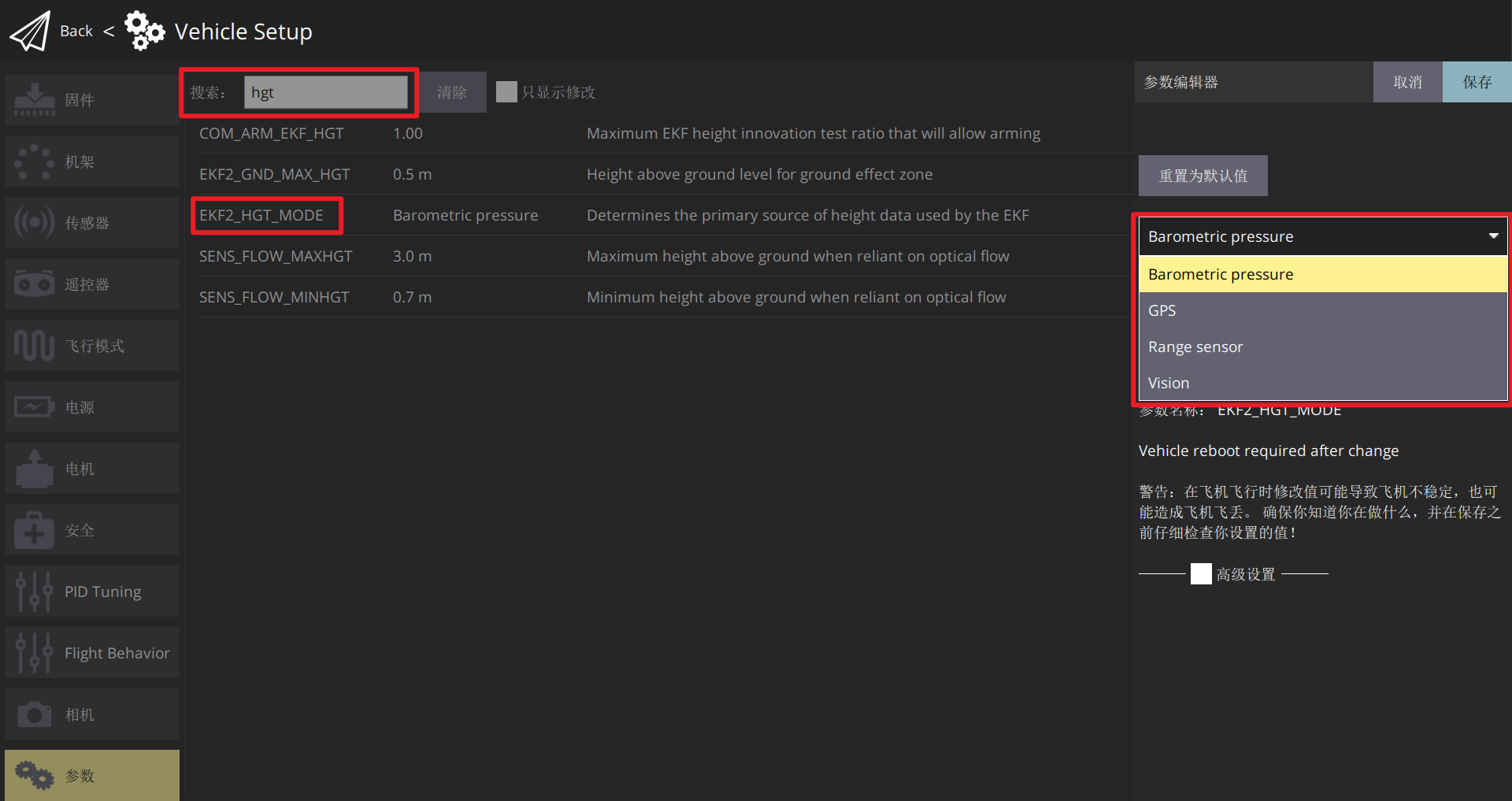
EKF2_HGT_MODE
该参数为选择无人机高度数据来源参数,在搜索框内搜索
hgt可快速找到该参数,点击参数进入参数设置界面,选择Barometric pressure,将高度数据来源设置为气压计
-
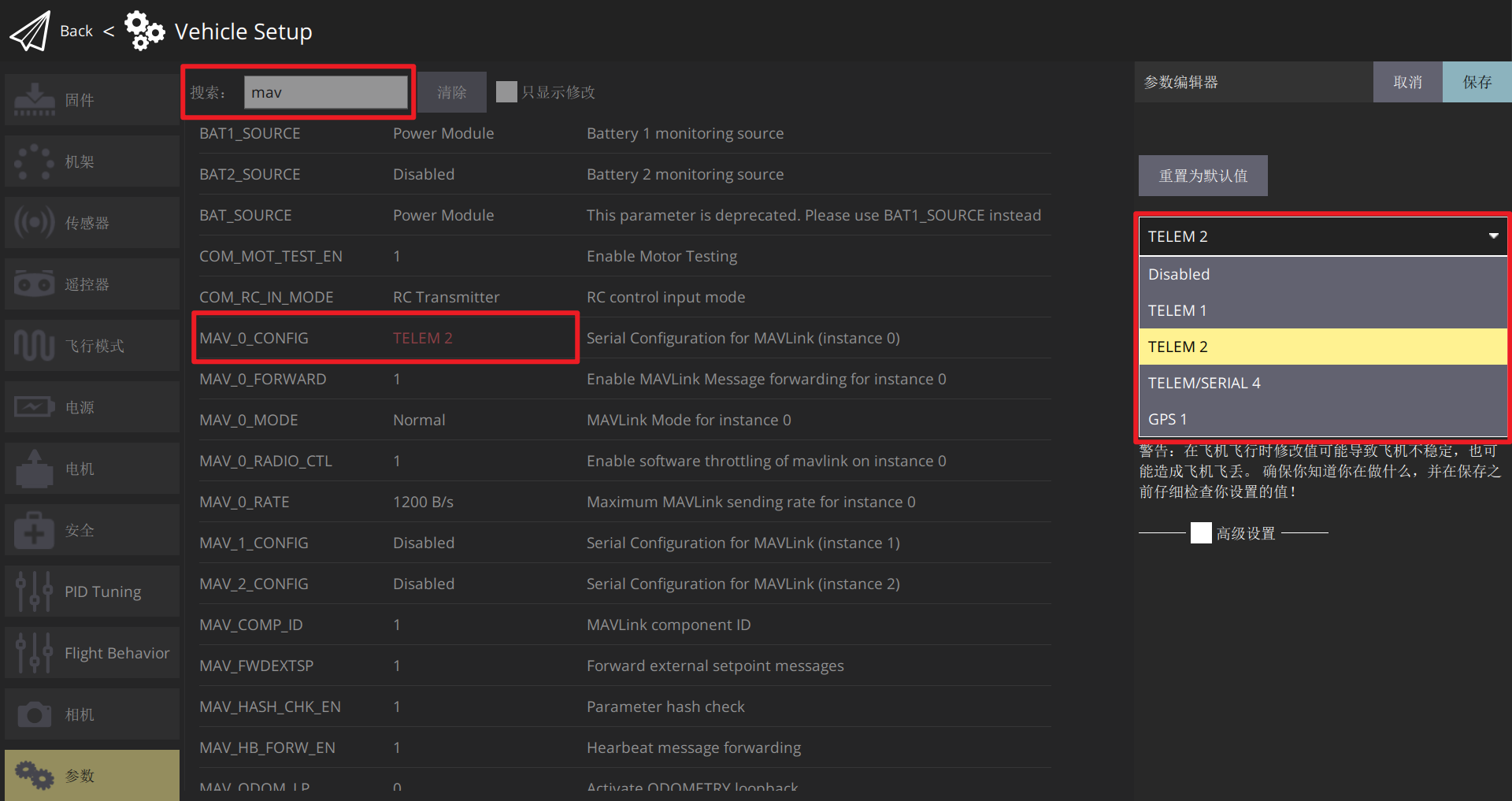
MAV_0_CONFIG
该参数为选择mavlink消息输出的接口,在搜索框内搜索
mav可快速找到该参数,点击参数进入参数设置界面,选择TELEM2
-
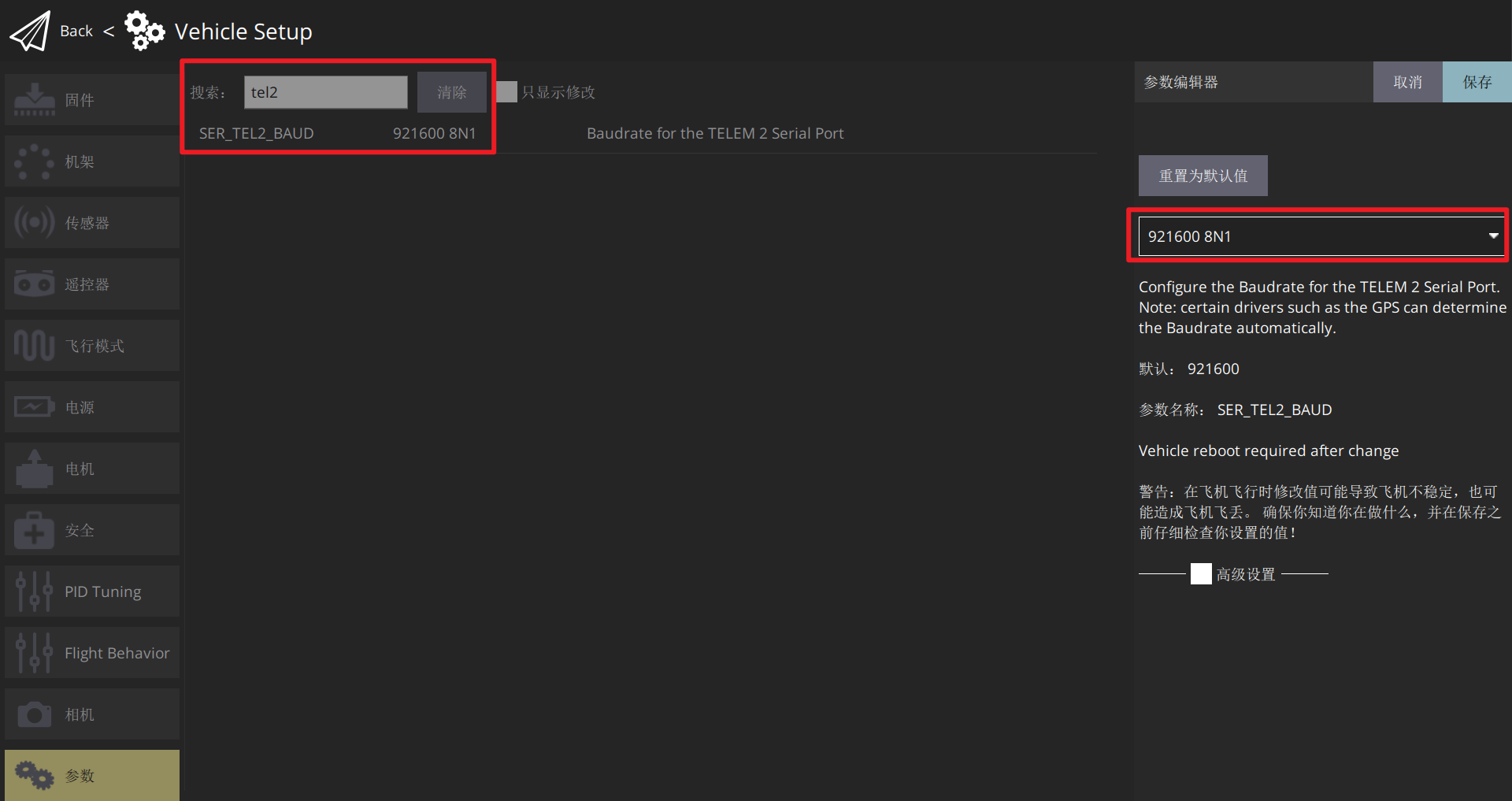
SER_TEL2_BAUD
该参数为选择
TELM2接口波特率的参数,在搜索框内搜索tel2可快速找到该参数,点击参数进入参数设置界面,选择921600 8N1
注意
MAV_0_CONFIG和SER_TEL2_BAUD两个参数的设置,是因为Prometheus项目代码默认为飞控与无人机通信采用TELEM2口,波特率为921600,如果机载计算机端与飞控连接方式改变,则相应地需要修改飞控参数以及Prometheus项目代码
机载计算机与飞控连接
硬件连接
下图为Pixhawk2.4.8的接口示意图,其中TELM2口引脚从左到右依次为5V、TX、RX、CTS、RTS、GND。
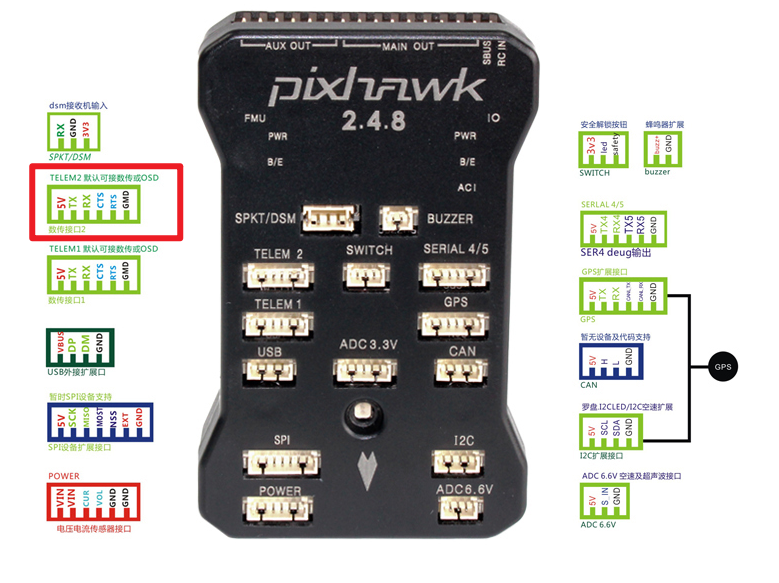
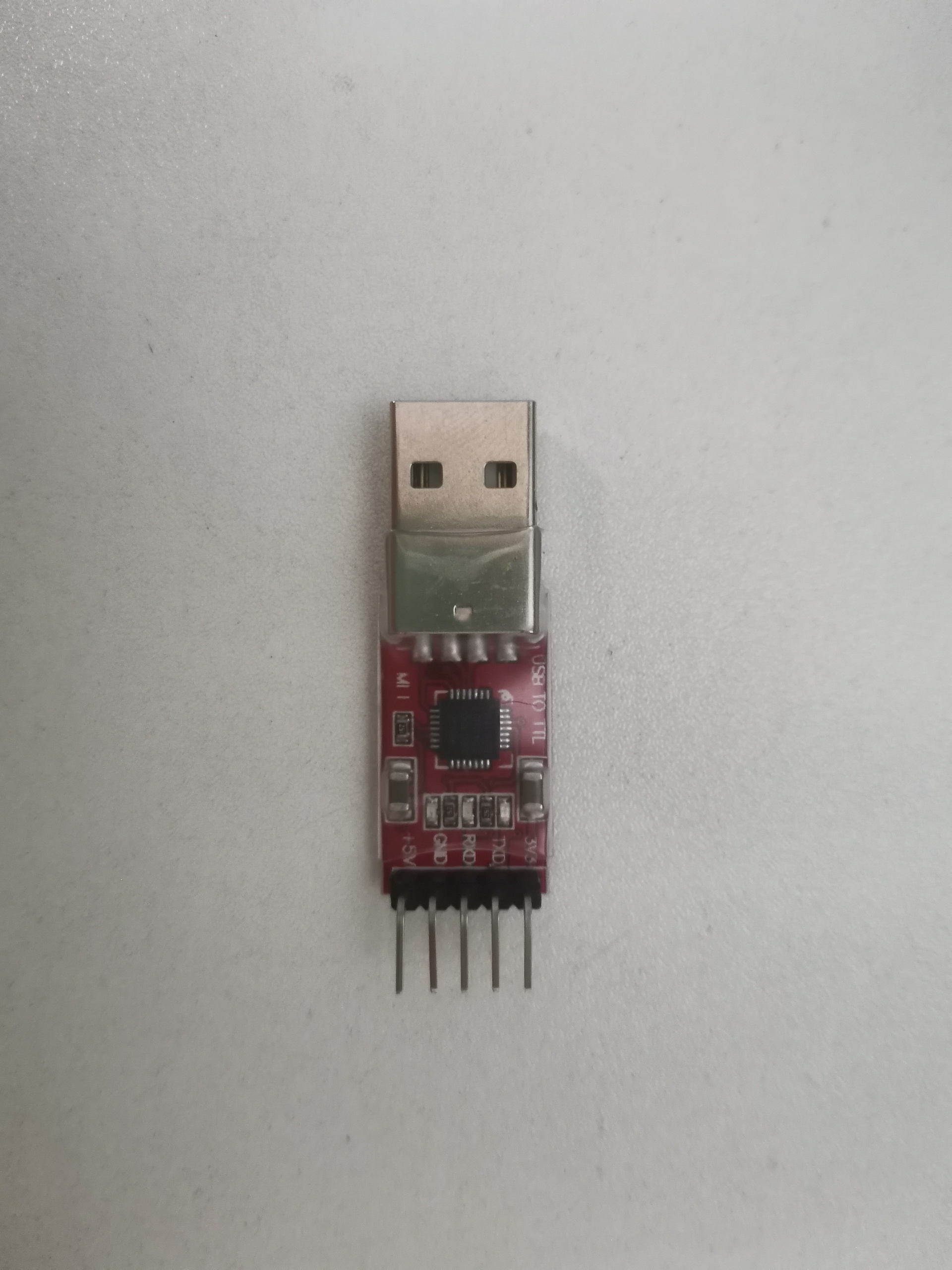
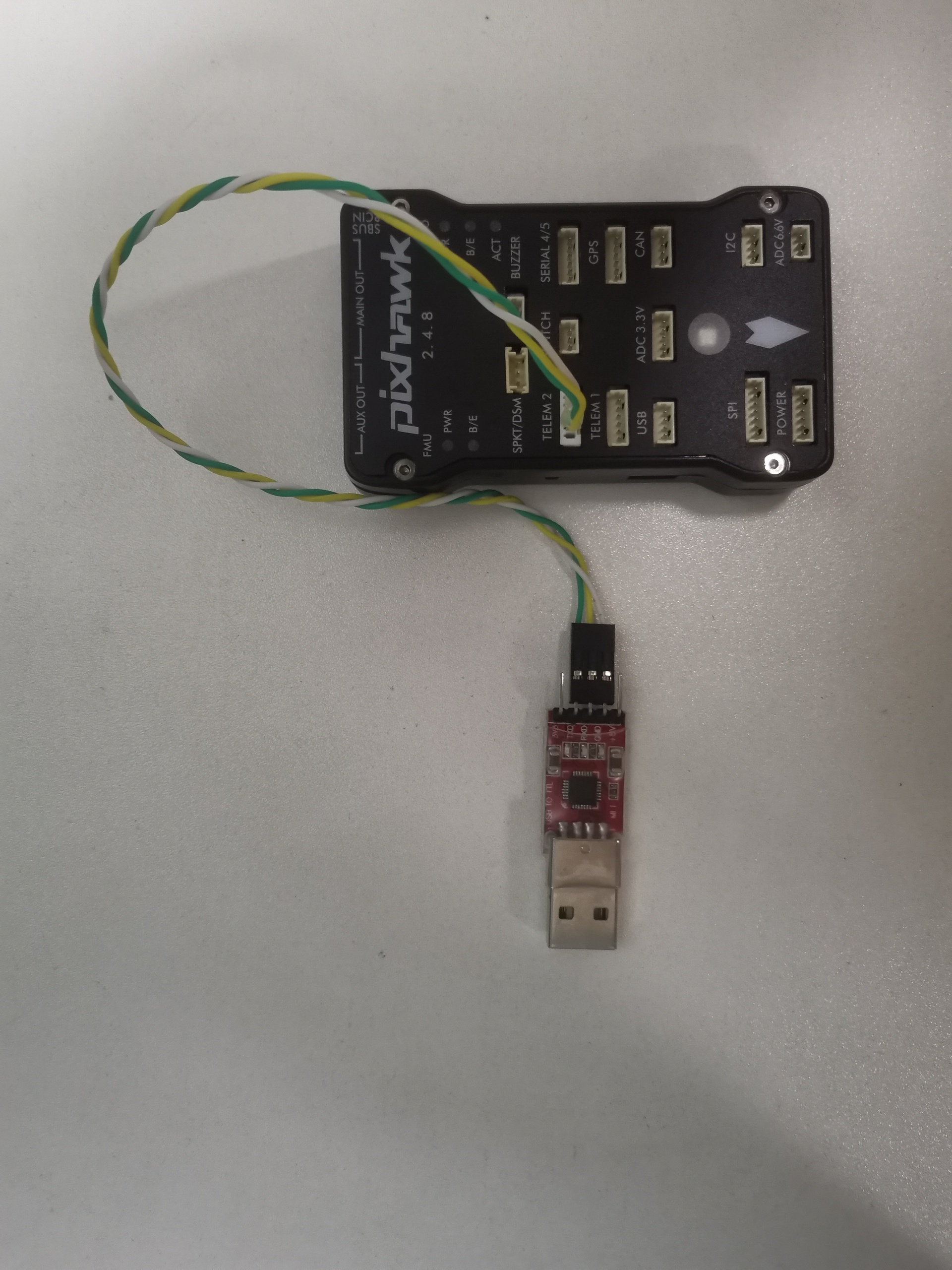
使用TTL转USB模块将飞控与机载计算机连接,需要连接TX、RX、GND
飞控TELEM2口的TX与TTL转USB模块的RX连接
飞控TELEM2口的RX与TTL转USB模块的TX连接
飞控TELEM2口的GND与TTL转USB模块的GND连接
软件连接
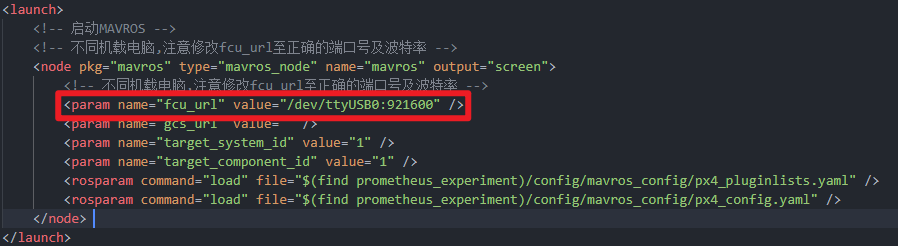
在上一节中PX4参数修改已经提到MAV_0_CONFIG以及SER_TEL2_BAUD两个连接相关的参数,飞控连接的软件设置按照教程内容设置即可。
在机载计算机端,需要确认Prometheus项目对应的MAVROS启动参数是否配置正确,文件位于Prometheus/Experiment/launch文件夹下,打开文件夹下的prometheus_experiment.launch文件,确认fcu_url参数是否为/dev/ttyUSB0:921600